За последнее время многие зарубежные компании приложили немало усилий для использования бесплатной солнечной энергии. Топливный кризис подталкивает человечество к поиску альтернативных источников. Проблема получения и рационального использования энергии актуальна для всего человечества, и один из путей ее решения — создание машин и устройств, работающих на солнечных батареях.
Зарубежные радиолюбители занимаются созданием солнечных роботов с прошлого века. Их конструкции в виде небольших моделей могут стать прототипами будущих машин на солнечной энергии. Например, на рис. 4.1 показаны роботы, собранные радиолюбителями в 1994-95 годах.
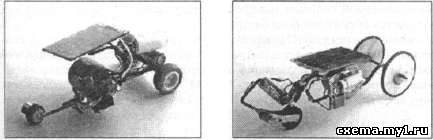
Рис. 4.1. Роботы на солнечных батареях, собранные радиолюбителями в 1994-95 гг.
Основные элементы конструкции — двигатель, тяга (основание), прижимной ролик и пассик от плеера, задняя ось с колесами от игрушки.
Робот, созданный канадскими радиолюбителями в 2008 году, состоит из солнечной батареи и электролитического конденсатора, схема на двух транзисторах (рис. 4.2). Основные элементы взяты от лентопротяжного механизма плеера и бобинного магнитофона (прижимной ролик).
Робот, показанный на рис. 4.3, изготавливается в Канаде промышленным образом в виде набора для самостоятельного творчества (подробности — на сайте www. solarbotics. com).
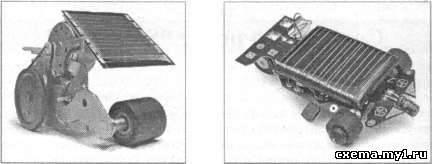
Рис. 4.2. Робот, созданный канадскими Рис. 4.3. Робот, созданный из набора
радиолюбителями в 2008 году деталей для самостоятельной сборки
Конструкции на фотоэлементах участвуют в соревнованиях устраиваемых в робот-играх "BEAM" (аббревиатура "BEAM" состоит из первых букв английских слов "Биотехнология", "Эволюция", "Аналоговые системы", "Модульные принципы" [4,5]). Условия соревнования следующие... Робот должен проехать как можно дальше по ровной, хорошо освещаемой солнцем поверхности. При этом для движения не используется аккумуляторная батарея.
Основная идея конструкции заключается в том, что энергия от солнечных батарей заряжает электролитический конденсатор большой емкости, а затем, при срабатывании компаратора, передается на двигатель. Более подробно с условиями игр "BEAM" можно ознакомится на сайтах www.solarbotics.com и www.powerfilmsolar.com.
Дизайн
Автор специально создал модель "Solar bot" на основе распространенных дешевых деталей и вышедших из употребления приборов. Фотоэлементы позаимствованы из китайских микрокалькуляторов с двойным питанием. В этих приборах рабочие фотоэлементы служат просто бутафорией, поэтому их характеристики сильно варьируются.
Второй основной элемент — это двигатель, взятый из нерабочих часов автомобиля "Жигули 2106", установленных на "торпеде" машины. Возможны и другие варианты двигателей, например, — от китайских дешевых часов. Двигатель часов работает в импульсном режиме. Если частоту импульсов увеличить до предела, то получим низкоскоростной двигатель на 1-100 об/мин. Это позволит сэкономить на редукторе, а значит, — и уменьшить вес конструкции.
Исходя из основных принципов создания робота, можно собрать схему управления на микросхемах низкой интеграции, например: NE555, логика, триггер Шмидта, аналоговые компараторы и т.д. Но схема на простых элементах не отличается гибкостью и сложна в перенастройке. Кроме того, не все микросхемы работают на напряжении 3,0 В, а при монтаже корпусов типа DIP увеличивается вес конструкции.
По этой причине в основу схемы управления автор заложил микроконтроллер ATtinyl5, изготовляемый в легком корпусе SOIC 8 [1]. Поскольку он оснащен Flash-памятью, программу можно в любой момент откорректировать и переписать, что придает схеме гибкость в использовании.
Зарубежные радиолюбители приложили усилия в другом направлении электроники, упростив схему до двух транзисторов, зарядного конденсатора и нескольких резисторов. Автор считает, что такие схемы не имеют будущего в управлении сложными процессами. Схема с микроконтроллером достигает наивысшего КПД за счет малого потребления тока и возможности перераспределения энергии. Кроме того, в ней предусмотрено ручное регулирование параметров.
Структурная схема
Структурная схема робота "Solar bot" (рис. 4.4) состоит из следующих элементов:
• фотоэлемент FS;
• диод Шотки D;
• микроконтроллер (МК);
• электролитические конденсаторы С1-С4;
• ключевой транзистор VT;
• двигателя от часов (Motor);
• аккумуляторная батарея питания микроконтроллера U;
• регулятор скорости движения R1;
• регулятор уровня заряда конденсаторов R2;
• регулятор уровня срабатывания R3.
Солнечная энергия попадает на фотоэлемент FS, который генерирует электрический ток. Фотоэлемент состоит из нескольких последовательно включенных элементов, которые генерируют напряжение порядка 3,2..4 В. Ток проходит от FS через диод Шотки D и заряжает электролитические конденсаторы С1-С4.
Микроконтроллер оснащен 10-разрядным АЦП с тремя входными аналоговыми каналами, который поочередно считывает уровень задаваемой скорости движения с РЛ> уровень заряда электролитов с R2 и уро-
вень включения двигателей с R3. Аналоговый сигнал считывается с частотой около 50 кГц.
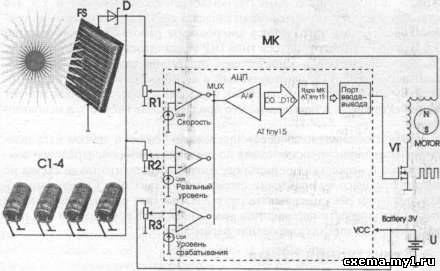
Рис. 4.4. Структурная схема робота "Solar bot"
Как только уровень заряда конденсаторов достигает установленного уровня, включается программа генерации импульсов с частотой, соответствующей заданной скорости. Эти импульсы поступают на транзистор VT, который коммутирует ток в обмотке двигателя. Движение продолжается до момента разряда конденсаторов С1-С4.
Для питания микроконтроллера используется батарея питания 3 В. С помощью регулировки Rl, R3 можно добиться требуемого эффекта движения робота. Тем не менее, увеличение скорости может привести к снижению КПД часового двигателя. На большой скорости магнитное поле будет рассеиваться, тогда как вращение вала будет ограничено. Кроме того, конструкция не обладает необходимой для собственного движения инерции, поскольку слишком мало весит и, к тому же, мдгнит часового двигателя создает магнитное торможение при отсутствии протекания тока через обмотку сердечника.
Еще одной из нерешенных проблем является конфликт источника с нагрузкой. Солнечная батарея выполняет роль источника ЭДС с небольшим током и низким напряжением, тогда как электролитический конденсатор при включении имеет бесконечно малое сопротивление.
При заряде от солнечной батареи в начальный момент конденсатор шунтирует батарею и может вывести ее из строя. Однако между солнечной батареей и конденсатором установлен диод. Исходя из физических законов, постоянное барьерное падение напряжения на диоде со-ставляег от 0,1 до 0,8 В. В данной схеме использован диод Шотки BAS 70, для которого максимальный прямой ток составляет 70 мА, а падение напряжения — 410 мВ при токе 1 мА и 750 мВ при токе 70 мА. [2]
Благодаря применению диода BAS 70, предотвращается выход из строя фотоэлемента, как источника. При росте силы тока напряжение на фотоэлементе падает до нуля, и поскольку диод Шотки имеет барьер минимум 410 мВ, рост тока будет ограничен на безопасном уровне. Однако в солнечный день фотоэлемент может генерировать значительный ток, поэтому применены два параллельно включенных диода. Такое решение позволяет экономно использовать энергию фотоэлемента. В одном корпусе В AS 70 находятся два диода, но для рассеяния тепловой мощности лучше использовать отдельно два корпуса BAS 70. Это улучшит КПД схемы и позволит безопасно использовать ресурсы энергии солнца.
Принципиальная схема
Схема робота "Solar bot" (рис. 4.5) питается от солнечной батареи G1 через диоды Шотки Dl, D2. В солнечной батарее установлены фотоэлементы, подключенные попарно, чтобы достичь напряжения 3,5..4 В. Функцию управления выполняет микроконтроллер IC1 с отдельным питанием от батарейки G2. Микроконтроллер ATtinyl5 сохраняет работоспособность при напряжении 2,7..5,5 В. [1]
Как только на поверхность фотоэлементов попадают ^учи солнца, генерируется ток, который заряжает конденсаторы СЗ-С7 до уровня 3,5..3,8 В. АЦП1 (ADC2 микроконтроллера) отслеживает уровень заряда конденсаторов, снимая напряжение с делителя Rl, R2 и сравнивая его со значением напряжения на АЦПЗ. АЦПЗ (ADC1 микроконтроллера) снимает напряжение, заранее установленное на R6. Тем самым на R6 можно регулировать порог запуска двигателя.
Для оперативного изменения скорости вращения двигателя (частота импульсов) можно изменять уровень напряжения на R4, который снимается на АЦП2 (ADC3 микроконтроллера). К4 подключен к конденсаторам, и во время разряда уровень также будет падать. Поскольку для микроконтроллера организовано независимое питание, АЦП2 (AJDC3) будет фиксировать снижение напряжения, а программа — уменьшать частоту следования импульсов. При разряде конденсаторов движение
конструкции начнет замедляться. В начальное состояние микроконтроллер сбрасывается внешней цепочкой R5, С8.
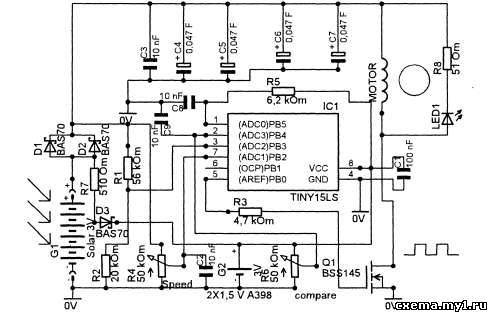
Рис. 4.5. Принципиальная схема робота "Solar bot"
Для питания микроконтроллера установлена батарея G2, которая может подзаряжаться через R7, D3. Как только микроконтроллер сравнил значения с АЦП и проверил заряд конденсаторов, программа формирует импульсы для включения транзистора Q1. Транзистор Q1, коммутируя ток в обмотке двигателя, заставляет протекать ток в импульсном режиме. При этом во время закрытия транзистора Q1 ток замыкается через цепочку LED1, R8. Тем самым Q1 предохраняется от перегрузки, а паразитный ток используется для свечения светодиода, что позволяет судить о работоспособности схемы в случае механической неполадки.
Прежде чем собрать модель, необходимо проверить фотоэлементы. Опыты показали что с фотоэлементами производства Happy (НР-5514-4) генерируется напряжение 2,2 В, ток 2 мА; а для фотоэлементов Sumon-cle (RSC-2510) — напряжение 3 В, ток 1 мА (оба производителя — китайские). Тем не менее, продукция компании Sumoncle очень хорошо зарекомендовала себя при освещении в 200 люкс. Одна такая батарея
способна генерировать ток силой до 20 мА. Более подробно с характеристиками фотоэлементов от этого производителя можно ознакомится на сайте www.sumoncle.net (рис. 4.6).
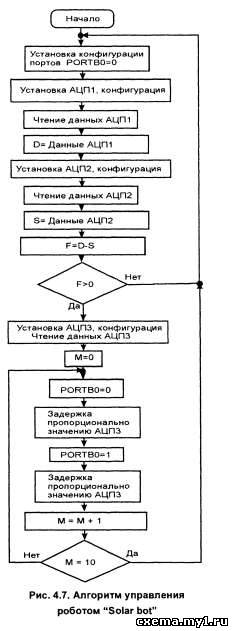
Алгоритм работы
Алгоритм управления роботом "Solar bot" (рис. 4.7) начинается с установки в нулевое состояние порта В, чтобы не вывести из строя транзистор Q1. Далее программа опрашивает уровни напряжений на АЦП. Соответствие схемы каналов АЦП с реальной схемой выводов микроконтроллера следующее:
• АЦП1 — ADC2, уровень заряда конденсаторов;
• АЦП2 — ADC3, уровень срабатывания при сравнении с АЦП1;
• АЦПЗ — ADC 1, скорость движения.
Как только уровень напряжения на АЦП1 достигает уровня на АЦП2, происходит переход к подпрограмме считывания данных АЦПЗ, которые задают промежуток времени между импульсами, подаваемыми на транзистор Q1, т.е. частоту импульсов, а значит — скорость движения конструкции. Поскольку данные АЦП1 сильно зависят от уровня напряжения на конденсаторе, в блок-схеме задана генерация 42 импульсов с одной и той же частотой.
Для предотвращения выхода из строя АЦП1 в схеме предусмотрен делитель Rl, R2. R6 применяется для ручной регулировки уровня срабатывания и запуска движения робота. В схеме не предусмотрен широкий диапазон регулировки уровня, поэтому при регулировке R6 более 5/7 от номинала программа может попасть в "мертвую зону", когда данные АЦП1 всегда будут менее АЦП2. Однако солнечные батареи включены последовательно, поэтому суммарное напряжение на конденсаторе может достичь 4,5 В. Поскольку микроконтроллер питается от напряжения 3,0 В, мертвая зона R6 увеличится до значения 2,5/7 от номинала. Эти данные проверяются экспериментально. При настройке R6 необходимо отрегулировать на 1/4 от номинала, и в дальнейшем изменять значение для R6 в этой области не более 30% от величины сопротивления.
R4 позволяет изменять скорость движения робота, благодаря АЦПЗ. При этом АЦПЗ фиксирует не только напряжение, необходимое для задания временных задержек, но также изменят напряжение скорости движения при разряде конденсатора, что повышает КПД схемы. Если уве-

личить скорость до максимума, то, возможно, уменьшится КПД, при уменьшении же скорости робот будет двигаться слишком медленно и не выиграет соревнование.
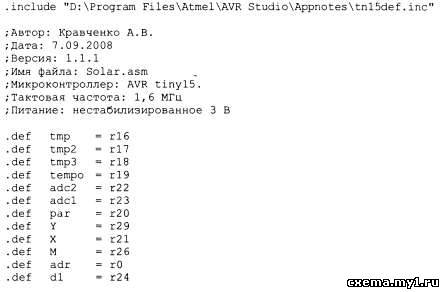
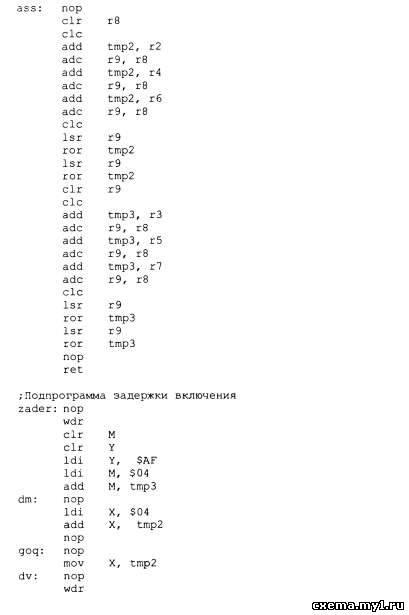
Программа
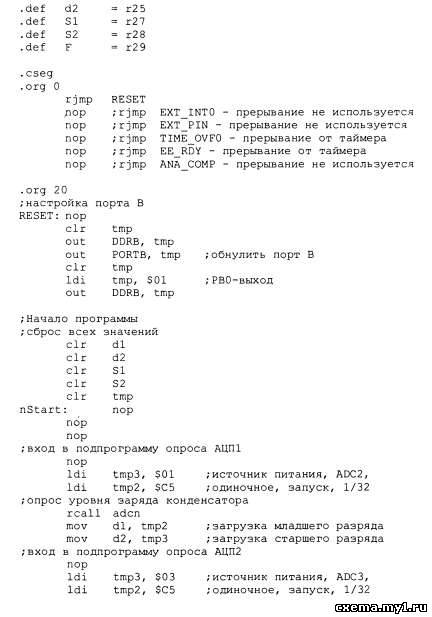
Программа (листинг 4.1) начинается с установки порта ввода-вывода В. В данной схеме выходом микроконтроллера является только один вывод РВО. Если некоторый разряд регистра DDRB установлен в лог. 1, то соответствующий вывод микроконтроллера работает как выход. В программе, кроме вектора RESET, другие векторы прерывания не используются.
На первом этапе выполнения программы происходит коммутация аналогового входа АЦП с помощью встроенного аналогового мультиплексора. Для этого в разрядах 0..2 регистра ADMUX устанавливается соответствующая комбинация нолей и единиц, а также определяется источник опорного напряжения с помощью разрядов 6,7 регистра ADMUX.
На втором этапе в разрядах 0..2 регистра AJDCSR задается тактовая частота АЦП, путем деления тактовой частоты микроконтроллера. Разрешается работа АЦП, выбирается режим работы АЦП (в данном случае — одиночное преобразование), и активизируется преобразование.
Преобразование длится 25 тактов АЦП, и после его завершения
Солнечный робот "Solar bot"
79
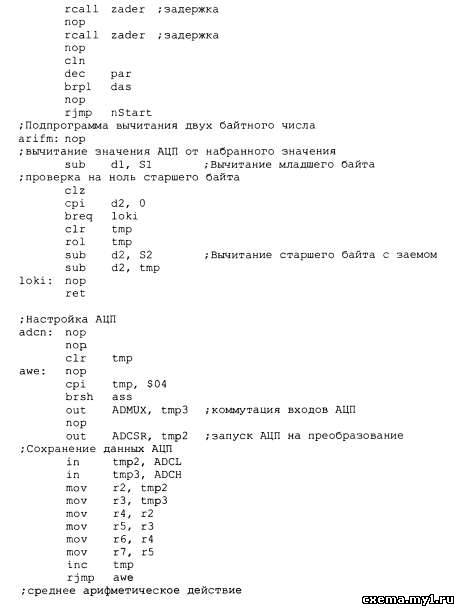
данные записываются в регистры данных АЦП ADCL и ADCH. Чтение регистров строго фиксировано: вначале ADCL, затем ADCH.
В таком виде считывания АЦП программа работает нестабильно из-за наводок и шумов от питающей сети. Автор не использовал "спящий" режим во время считывания АЦП. Эксперименты показали, что это необязательно. Для более точной и стабильной работы автор выполнил четыре преобразования, просуммировал данные и разделил на четыре (среднее арифметическое). Данные, получаемые от АЦП стали намного точнее и стабильнее. Отметим также, что коммутация выводов АЦП происходит с некоторой паузой, необходимой для электронного ключа мультиплексора.
Программа работает по алгоритму, описанному в блок-схеме, представленной на рис. 4.7. Длительность пауз и импульсов задана подпрограммой zader, которая зависит от данных АЦПЗ. Длительность формируется программным путем, поскольку ресурс таймера микроконтроллера ограничен. Вначале формируется нулевой уровень импульса, затем выполняется подпрограмма zader, потом формируется единичный уровень, и опять выполняется подпрограмма zader. Процесс повторяется циклически с заданным количеством импульсов. В представленной программе за секунду формируется 42 импульса.


Монтажная плата
Для уменьшения веса конструкции были выбраны SMD-элементы (рис. 4.8). Транзистор: Ql BSS101 или BSS145 [6]. В качестве электролитических конденсаторов применены ионисторы на 0,047 Ф и 5,5 В фирмы TOKTN. Ионисторы имеют большую емкость и малые габариты. Как указывалось ранее, фотоэлементы взяты от старых нерабочих калькуляторов с двойным питанием. Батарея G2 для питания микроконтрол-
лера состоит из двух батареек по 1,5 В А398 и позаимствована из нерабочих калькуляторов вместе с корпусом и платой крепления. Конденсаторы можно использовать SMD или миниатюрные. Микроконтроллер ATtinyl5 — в корпусе SOIC8.
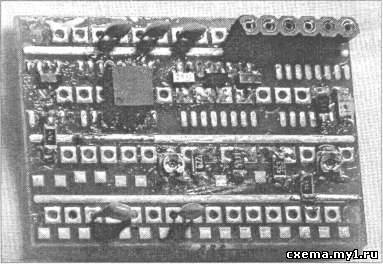
Рис. 4.8. Плата управления роботом "Solar bot"
Монтаж большинства элементов потребует хорошего зрения и терпения. При сборке конструкции в качестве платы управления автор использовал макетницу и элементы поверхностного монтажа (даже под-строечные резисторы), однако для радиолюбителей была также разработана монтажная плата (рис. 4.9) с габаритными размерами 74x42 мм.
Батареи Gl, G2 и конденсаторы С5-С7 вынесены за пределы платы. Конденсаторы (ионисторы) спаиваются в отдельную батарею и устанавливаются на отдельную площадку рядом с двигателем. Поскольку они обладают значительным весом, их низкое расположение придает конструкции устойчивость.
Перед установкой микроконтроллера на плату необходимо записать в него программу, представленную выше в листинге 4.2 (автор реализовал на макетной плате разъем для оперативного изменения программы).
Далее плату крепят к верхней панели и соединяют ее проводами с батареями Gl, G2. Провода от фотоэлементов G1 должны быть максимально гибкими, поскольку монтажные площадки на фотоэлементах не выдерживают усилия и отрываются, а восстановить их невозможно.
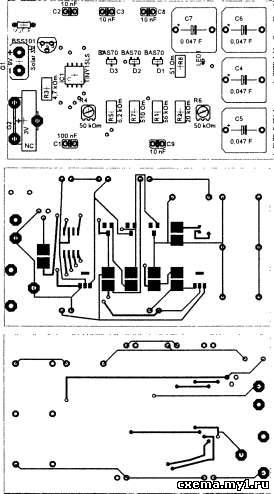
Рис. 4.9. Монтажная плата робота "Solar bot"
Фотоэлементы, батарейки микроконтроллера и конденсаторная батарея подключены к плате через разъем. Это дает возможность оперативно заменять эти элементы. Кроме того, автор предполагает проводить эксперименты с различными конденсаторами разной емкости, поэтому конденсаторы вынесены за пределы платы.
Конструкция
Конструкция собрана из коробки для оптических дисков. Эскиз конструкции с размерами основных узлов представлен на (рис. 4.10).
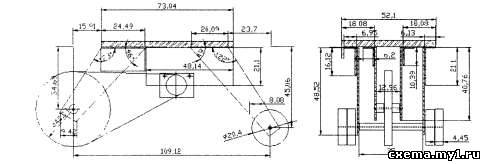
Рис. 4.10. Эскиз конструкции робота "Solar bot" с указанием размеров
Внешний вид конструкции представлен на рис. 4.11.

Рис. 4.11. Внешний вид конструкции робота "Solar bot"
Габариты несущей панели — 73x52 мм. Ее размеры зависят от размеров фотоэлементов. Для фотоэлемента Happy (НР-5514-4) он составляет 14x55 мм при толщине 1 мм. На панель можно установить пять таких фотоэлементов.
Переднее колесо позаимствовано от плеера. От ролика двигателя движение к переднему колесу передается через пассик. Ролик двигателя насажен с одной стороны на вал, а с другой — на скобу в виде пружины
(рис. 4.12). Такое решение позволяет натягивать пассик, чтобы он не проскальзывал.
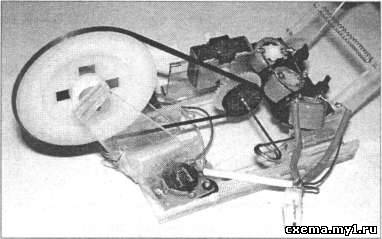
Рис. 4.12. Крепление ролика двигателя
Задние колеса изготовлены из плотного полистирола. Стойки колес стянуты пружинами. Для ограничения стягивания пружин между стойками установлены пластиковые трубочки от соломинок для напитков. Плата управления устанавливается снизу основной несущей панели. Ближе к переднему колесу к основной панели крепятся две батарейки, для питания микроконтроллера. Все платы крепятся винтами и гайками с резьбой Ml,6.
Сборка
Вначале из пластиковой коробки для компакт-дисков вырезаются детали конструкции по размерам, указанным на рис. 4.10: четыре уголка, четыре стойки для колес и основная несущая панель. На стойках высверливаются отверстия для пружин. Как только детали готовы, на основной панели фломастером наносятся линии, на которые клеятся детали, а затем место монтажа обрабатывается клеем (в данном случае — "Циакрин 90" для оргстекла). Детали прижимаются к клею и удерживаются в таком положении 10-30 секунд, после чего конструкцию оставляют сохнуть в течение часа.
Как только все узлы просохли, можно приступать к сборке механических узлов и монтажа схемы. Фотоэлементы, как наиболее хрупкие детали, крепятся к конструкции только после монтажа. При этом они
располагаются в наивысшей точке точно в горизонтальной плоскости (рис. 4.13). При движении конструкции это позволяет максимально использовать энергию лучей солнца при любом угле падения луча на поверхность фотоэлемента.

Рис. 4.13. Размещение фотоэлементов на конструкции
Для того чтобы фотоэлементы не съезжали во время движения, на нижнюю плоскость элемента клеится двухсторонний скотч. Фотоэлементы укладываются на поверхность панели через пористую резиновую подложку и фиксируются жидкой пластмассой или прозрачным герме-тиком. После сборки обязательно необходимо стянуть стойки колес пружинами, поскольку от веса конструкции они расходятся в стороны. Пружины можно взять от старых авторучек или зажигалок (рис. 4.14).
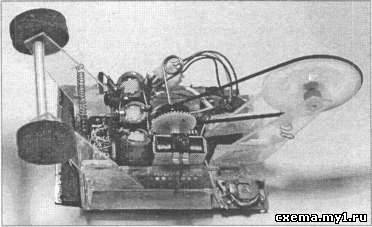
Рис. 4.14. Стойки колес стянуты пружинами
Эксплуатация
Перед началом эксплуатации резистор R4 устанавливается на половину рабочего сегмента, a R6 — на 1/4 сегмента регулировки двигателя (по отношению к нулевому проводу или "земле"). Далее необходимо установить заряженные батарейки для питания микроконтроллера и разместить робота на ярко освещаемой солнцем ровной поверхности. Как только конденсаторы робота зарядятся, конструкция начнет движение, которое будет продолжаться до полного разряда конденсаторов. Во время движения будет включаться светодиод, использующий в качестве энергии паразитные токи. Конструкция, проехавшая дальше, занимает первое место в соревновании.
Файлы к статье Солнечный робот "Solar bot"

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!