Во время разработки радиомоделей автор столкнулся с проблемой формирования питания для схемы блока управления. В различных устройствах всегда требуется дополнительное нестандартное питание. Использовать гасящий резистор большой мощности или дополнять батареи питания еще одним элементом — не всегда разумное решение проблемы. На практике для повышающего преобразователя применяются специализированные микросхемы МАХ641-МАХ643, МАХ 1703, и их российские аналоги. Однако такой подход не всегда оправдан, поскольку эти детали редко бывают в продаже.
Параметры внутреннего генератора специализированных микросхем заранее заданы, изменить схему и подстроится под нужды нагрузки не так-то просто. Эта проблема особенно остро стоит в синхронизированных системах, которые часто встречаются в многозвенных источниках питания. Кроме того, служебные средства, распознающие происхождение сбоя, ошибки или короткого замыкания, в специализированных микросхемах очень ограничены и неинформативны.
По этой причине автор разработал повышающий преобразователь на микроконтроллере Tiny 15 [3]. При этом были проверены ресурсы микроконтроллера и принципиальная возможность его применения в преобразовательной технике. Также была определена структура программы и оценено быстродействие заложенного алгоритма для будущих разработок. Применение микроконтроллера позволяет точно и быстро определить причину сбоя источника, предотвращает выход из строя деталей, в случае кратковременного сбоя автоматически выводит источник на необходимый режим. В перспективе возможна реализация индикации напряжения и служебной информации в цифровом виде на более развитом и быстродействующем контроллере.
Схема построена по классическим методам создания повышающих преобразователей [11, 12, 13] (рис. 8.1). Транзисторный ключ преобразователя Q1 работает в импульсном режиме, попеременно включаясь и выключаясь.
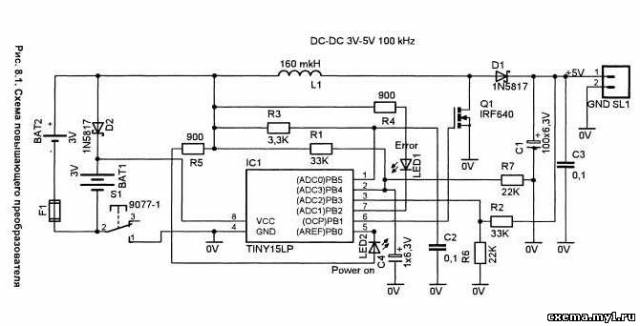
Когда транзистор открыт, ток от источника питания Un протекает через дроссель L. В дросселе линейно растет ток и накапливается энергия. При этом ток в нагрузку от источника не поступает, поскольку прямое включение диода D1 имеет порог включения, который выше падения напряжения на сопротивлении открытого транзистора (транзистор необходимо подбирать с очень маленьким сопротивлением открытого состояния). В этот момент ток в нагрузку поступает только от разряда конденсатора С1 (в начальный момент ток конденсатора 1с = 0).
Когда транзистор закрывается, ЭДС самоиндукции дросселя суммируется с выходным напряжением на конденсаторе С1 и энергия тока дросселя передается в нагрузку. При номинальном сопротивлении нагрузки излишек энергии передается на заряд емкости С1. Ток в нагрузке протекает непрерывно. Этот режим называется "режимом непрерывного тока нагрузки". Если нагрузка увеличилась выше нормы (сопротивление упало ниже номинального на величину более 50%), то возникает нехватка энергии заряда дросселя. В этот момент наступает режим прерывистых токов нагрузки, пульсация напряжения увеличивается, и преобразователь уходит от стабилизации напряжения на нагрузке.
В начальный момент работы преобразователя напряжение на нагрузке растет ступенчато, постепенно выходя на режим стабилизации выходного напряжения (рис. 8.2). В режиме стабилизации напряжение на нагрузке имеет небольшую пульсацию, среднее значение равно напряжению стабилизации. Во время увеличения нагрузки пульсация растет, а при уменьшении нагрузки остается неизменной.

Для питания схемы автор применил два источника тока. Первый источник (батарея 2) состоит из соединенных последовательно батареек типа АА (2 штуки) в выносном батарейном отсеке, а второй (батарея 1) — элемент питания CR2032, установленный непосредственно на плате (рис. 8.3).
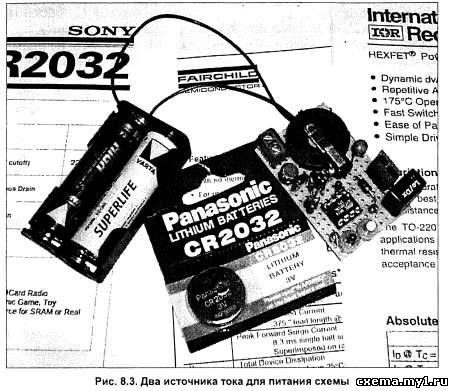
Такую конструкцию автор использовал для уменьшения влияния электромагнитных помех на окружающую среду, а так же для уменьшения индуктивной составляющей проводов, ведущих к батарейному отсеку. Кроме того, батарея 1 выполняет функцию аварийного питания контроллера. Это важно для будущих разработок, поскольку короткое замыкание зачастую нарушает работу всей системы. В такой ситуации микроконтроллер может прервать работу преобразователя, тем самым сохранив элементы схемы от выгорания. После останова преобразователя микроконтроллер выдает ошибку, которую устраняет пользователь. На такой основе построены все современные источники питания и преобразователи напряжения.
После включения и выхода на режим стабилизации загорается зеленый светодиод, что свидетельствует о нормальном состоянии питания нагрузки. В моменты коммутации нагрузки, выхода на режим или изменения параметров нагрузки зеленый светодиод гаснет, сообщая о критическом состоянии преобразователя. Как только произошло замыкание
или обрыв нагрузки, загорается красный светодиод, который мигает с паузами в 0,16 с.
В момент, когда красный светодиод не горит, преобразователь пытается автоматически запустится. Если запуск не произошел в течение 0,16 с, красный светодиод загорается на 0,16 с. Микроконтроллер отключает нагрузку, ток не подается непосредственно от источника через дроссель L.
В критических случаях при коротком замыкании предохранитель предотвращает возможность выхода из строя элементов схемы. При напряжении питания 3 В ток потребления микроконтроллера Tiny 15 в активном состоянии составляет около 3 мА. Емкости батареи 1 (CR2032) достаточно для питания микроконтроллера в аварийном режиме.
Расчет элементов схемы и методов стабилизации напряжения
Все расчеты приведены в таблице Excel на четырех листах (для расчета необходимой индуктивности дросселя и элементов схемы, автор использовал формулы из [11]).
Расчет схемы разбит на несколько этапов.
1. Расчет минимальной индуктивности дросселя и необходимых характеристик элементов схемы (желтый лист Индуктивность в таблице Excel).
2. Расчет количества витков дросселя по заданным параметрам сердечника (голубой лист Корпус L в таблице Excel).
3. Расчет длительности и скважности импульсов заданной частоты с учетом выбранной индуктивности дросселя (оранжевый лист Гамма в таблице Excel).
4. Расчет метода авторегулирования и устойчивости преобразователя (розовый лист ООС в таблице Excel).
Результат расчета — коэффициент усиления усилителя отрицательной обратной связи, полученный по методике, изложенной в [13]. Характеристики элементов преобразователя взяты из справочных материалов.
В качестве основы авторегулирования автор использовал метод фиксированных точек. Согласно теории, заранее расчетные значения
введены как фиксированные точки угла открытого состояния транзистора. В реальной схеме имитируется различное поведение нагрузки, и при значительных отклонениях вводятся поправочные коэффициенты в таблице коррекции. Таблица коррекции находится в конце программы и доступна для перепрограммирования в любой момент.
Таблица стандартных значений и коррекции приведена на зеленом листе Кор-' рекция файла Расчет параметров повышающего преобразователя.xls.
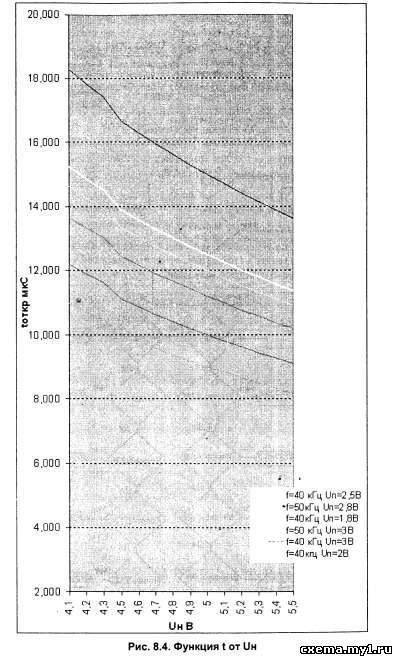
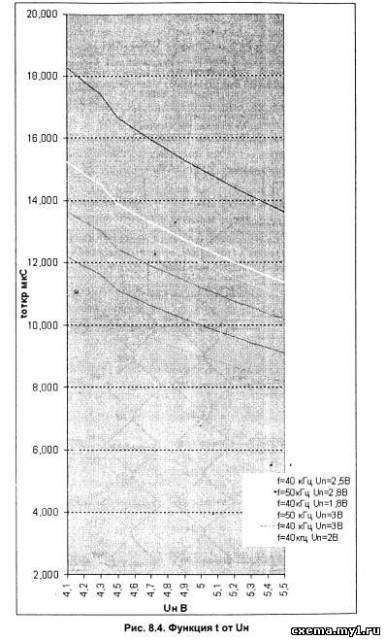
Метод фиксированных точек часто используется в устройствах реального времени, однако для компенсации провалов или всплесков напряжения на нагрузке угол регулируется по перекрестной схеме. Например, для компенсации провала напряжения нагрузки до 4,2 В при стабилизации на уровне 5,0 В необходимо изменить угол отпирания транзистора до значения, при котором достигается 5,8 В (рис. 8.4). Тем самым компенсируется провал в 0,8 В.
Программа
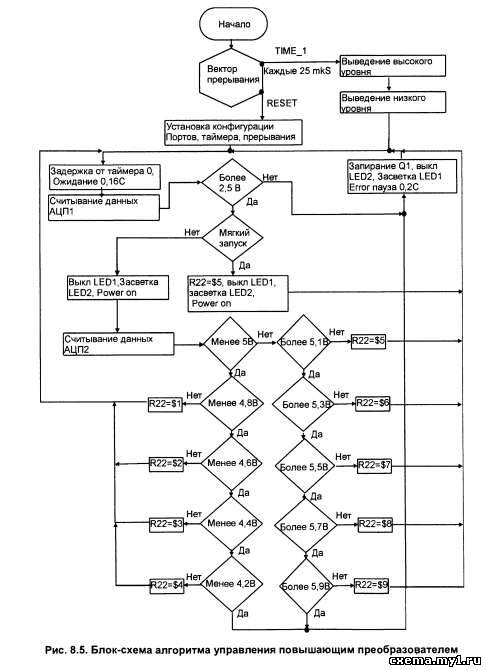
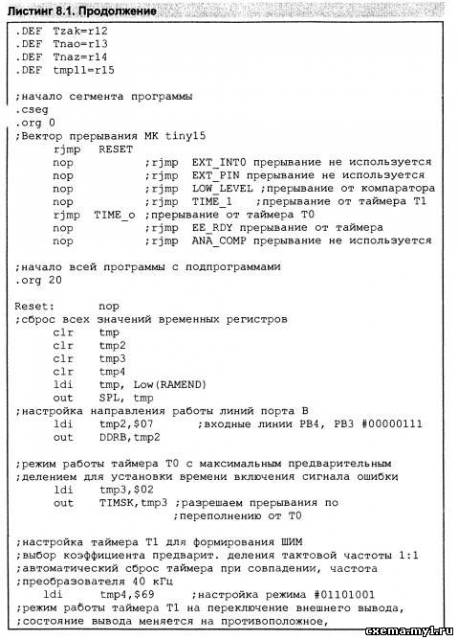
Блок-схема алгоритма программы представлена на рис. 8.5. В начале программы указывается вектор прерывания для перехода в необходимую подпрограмму. Далее настраивается ввод-вывод через порт В, а также таймеры ТО и Т1. Микроконтроллеры всегда выполняют функции управления, а функции генерирования импульсов успешно выполняет таймер, работающий в автоматическом режиме.
Таймер ТО устанавливается как вспомогательный элемент программы. За основу широтно-импульсного регулятора выбран таймер Т1 микроконтроллера, который может формировать импульсы различной длительности. Настройка таймера Т1 заключается в выборе тактовой частоты и режима широтно-импульсной модуляции (ШИМ). Тактовая частота микроконтроллера составляет 1,6 МГц, а частота преобразователя — 40 кГц. Известно, что микроконтроллер выполняет одну команду за один такт внутреннего генератора [3]. Простое арифметическое деление показывает, что для управления преобразователем можно использовать всего 40 команд. С другой стороны, быстрый отклик на изменение тока нагрузки может вызвать неустойчивое состояние преобразователя с од-нозвенным LC-фильтром [13]. По этой причине обработка данных выполняется в текущем режиме, а полученные данные заносятся в таймер, который формирует ШИМ-напряжение.
Напряжение на нагрузке измеряется раз в восемь циклов работы преобразователя. Для работы АЦП необходимо 25 тактов микроконтроллеров.
Исходя из расчетов, представленных в файле Расчет производительности повышающего преобразоателя. xls, для выполнения задачи авторегулирования имеется максимум 295 шагов программы.
Таймер Т1 настроен на синхронизацию от тактового генератора микроконтроллера с коэффициентом деления 1/64. Частота импульса задается путем ввода длительности полупериода. При прохождении цикла, состоящего из деления тактовой частоты внутреннего генератора и инвертирования выходного сигнала дважды, формируется период с заданной частотой.
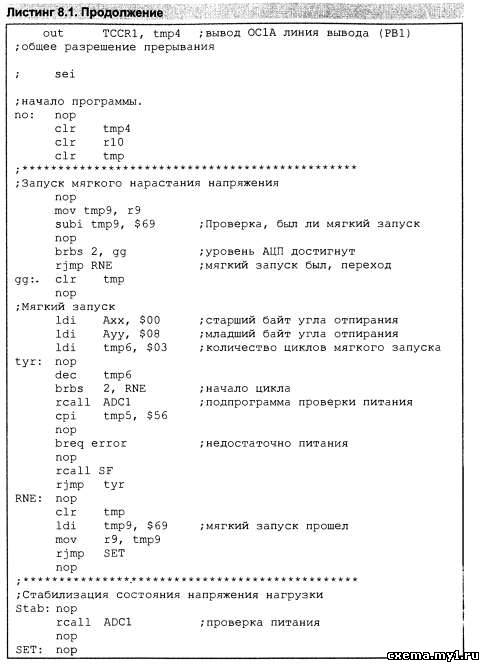
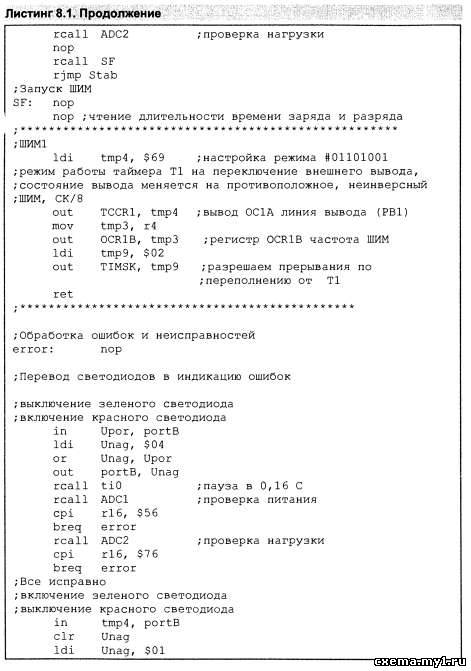
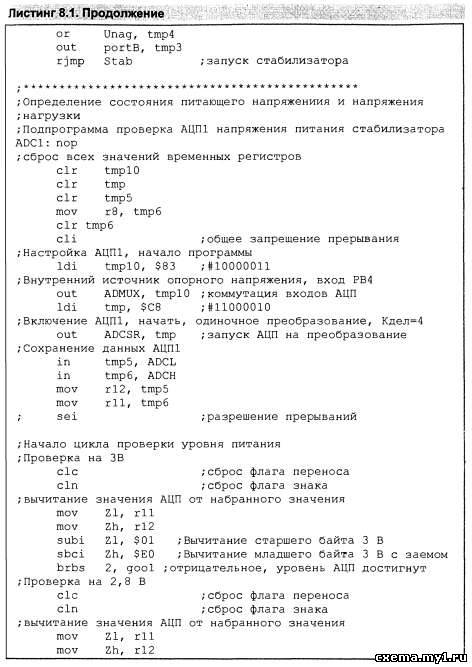
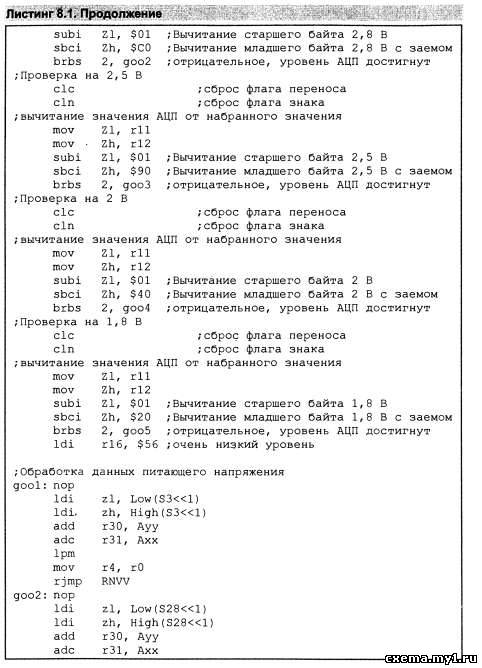
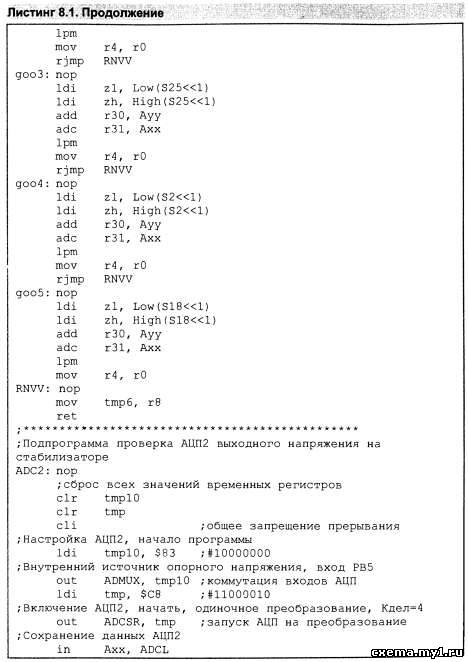
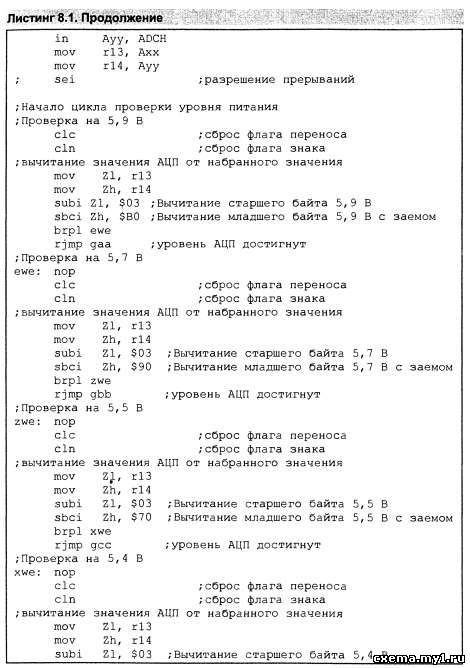
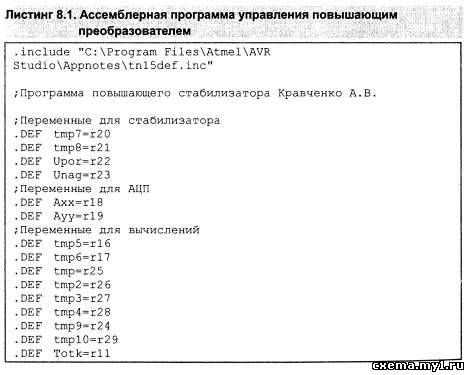
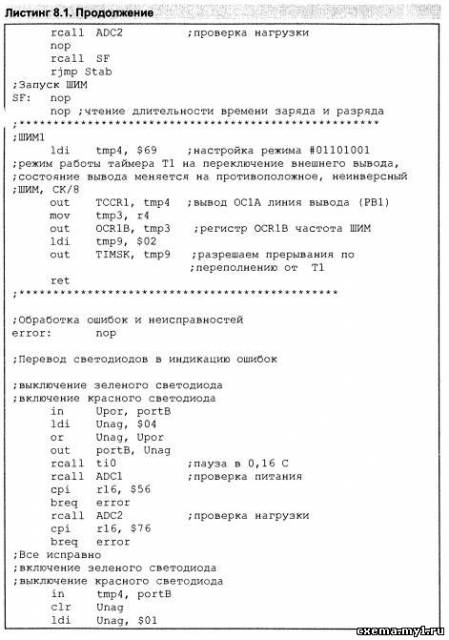
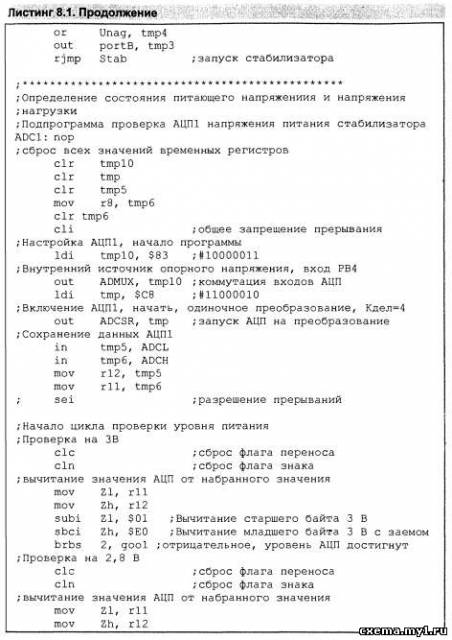
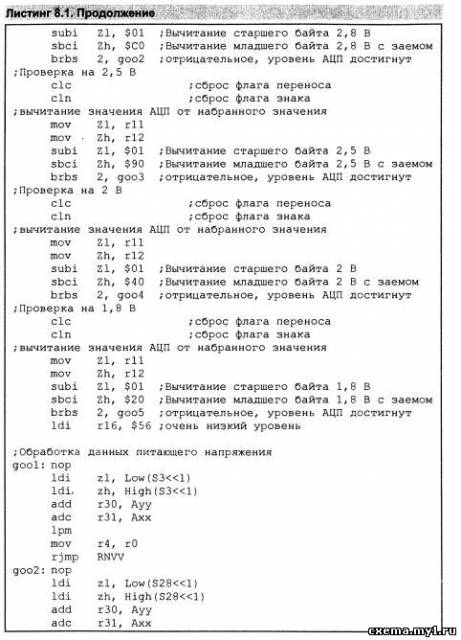
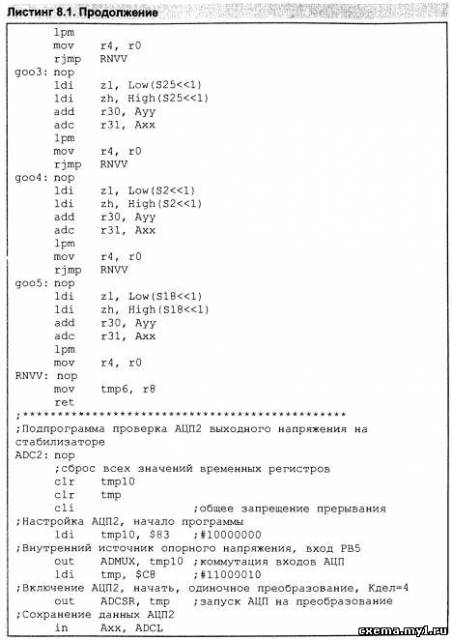
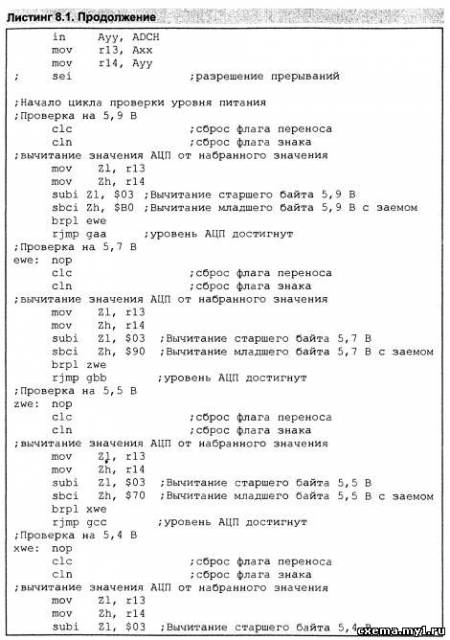
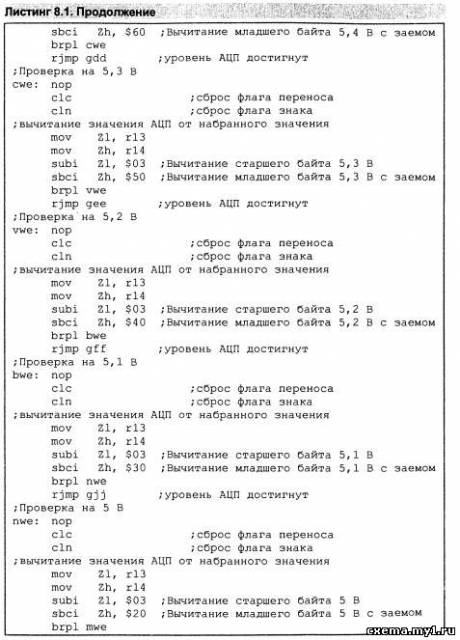
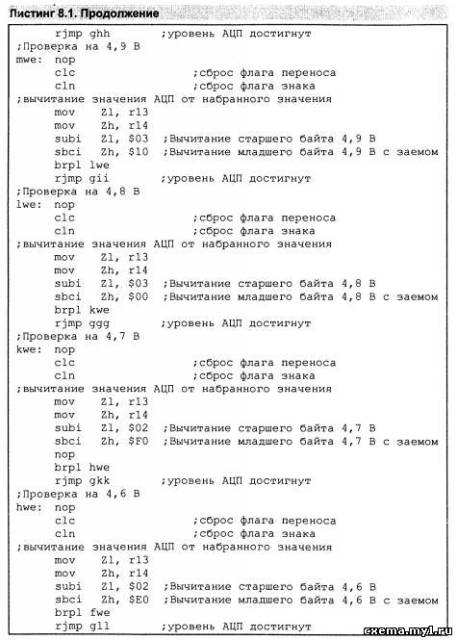
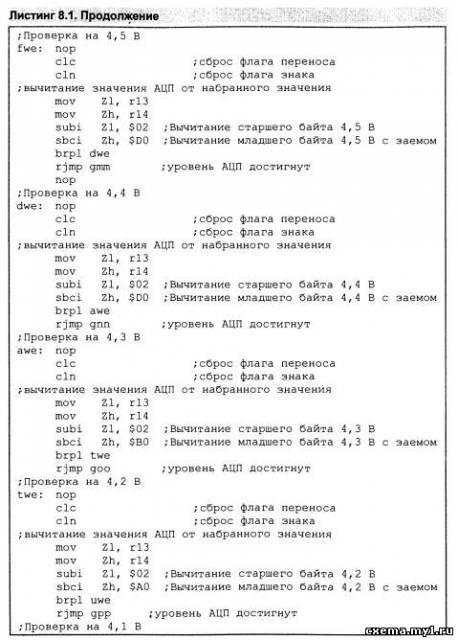
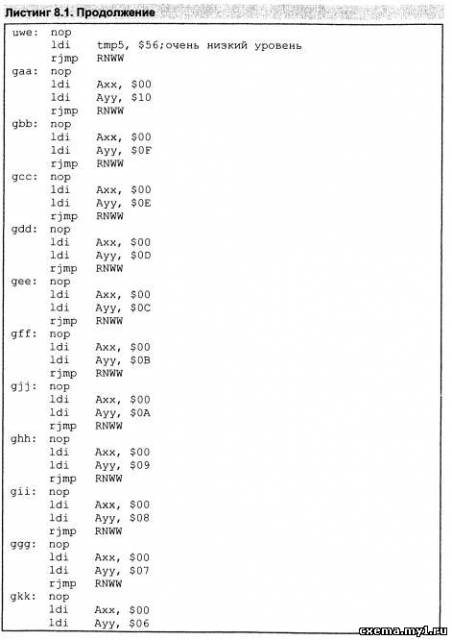
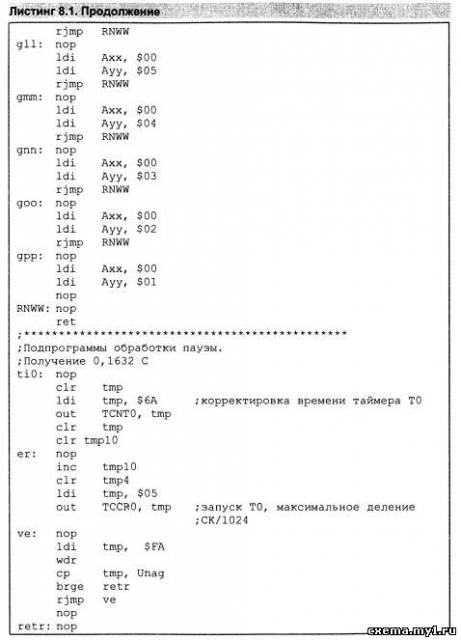
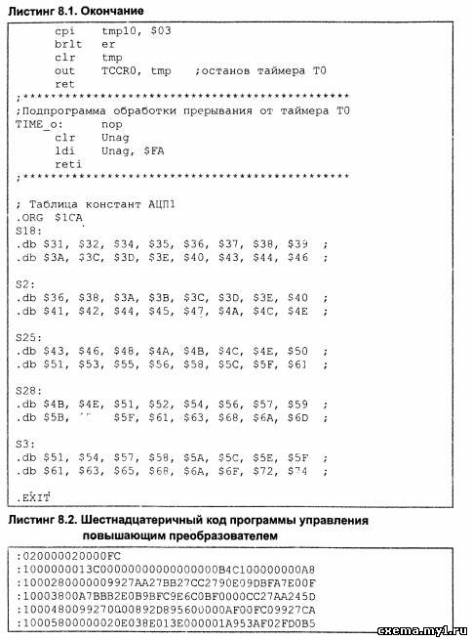
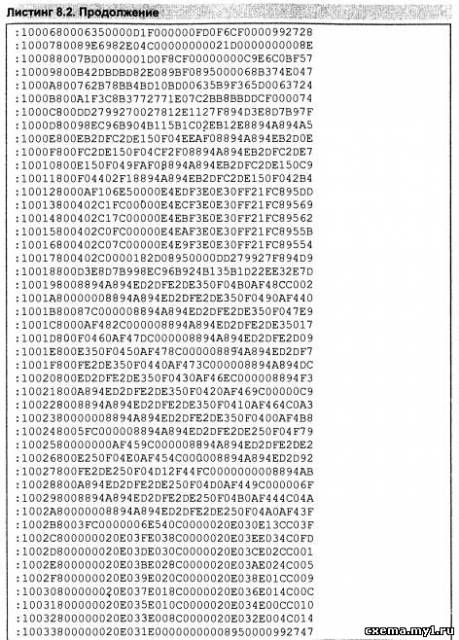
Код программы на ассемблере представлен в листинге 8.1, а шест-надцатеричный код — в листинге 8.2.
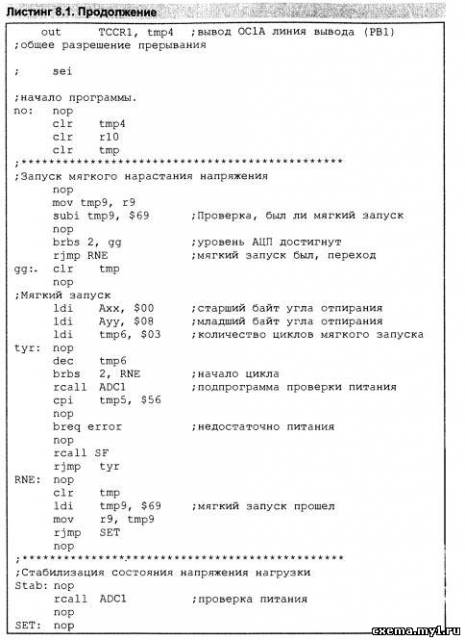
В основе программы заложено использование таймера Т1 совместно с альтернативной функцией OClA-вывода порта РВ1. В режиме ШИМ состояние счетного регистра TCNT1 изменяется от 0 до установленного значения в регистре сравнения OCR1B. При совпадении данных счетный регистр TCNT1 сбрасывается в 0. Цикл счета регистра TCNT1 повторяется, но при совпадении значения счетного регистра TCNT1 и регистра сравнения OCR1A напряжение на выводе РВ1 изменяется на противоположное до момента совпадения данных TCNT1 и OCR1B. В момент совпадения напряжение на выводе РВ1 изменяется на противоположное. Таким образом, содержимое регистра OCR1A определяет скважность ШИМ-сигнала (с максимальным углом заполнения единичного состояния от 0,1 до 0,5), а содержимое регистра OCR1B — его частоту.
Если угол заполнения более 0,5 и менее 0,7 (согласно таблице Расчет параметров повышающего преобразователя.xls, угол заполнения 0,7 является критическим), таймер Т1 переключается на режим инвертирования. В результате таймер Т1 отрабатывает угол заполнения нулевого состояния от 0,3 до 0,5.
После настройки таймеров программа выполняет алгоритм проверки входного напряжения питания с помощью встроенного АЦП. Для микроконтроллера Tiny 15 во время преобразования АЦП необходимо отработать непрерывно 25 тактов с запретом на прерывание (в представленной программе этот запрет исключен). В реальном времени выполняется подпрограмма обработки преобразования АЦП. Поскольку для получения достоверной информации от источника и от нагрузки необходимо два преобразования АЦП, то один раз за восемь тактов преобразователя выполняется также проверка напряжения источника питания. Проверка осуществляется и в случае аварии в нагрузке.
Начальный запуск и выход преобразователя на необходимое напряжение стабилизации реализованы с помощью начальной подпрограммы.
При этом проверка АЦП выходного напряжения на нагрузке не происходит — преобразователь выполняет задачу с фиксированным минимальным значением заполнения ШИМ. Далее, после нескольких тактов преобразователя с помощью АЦП проверяется напряжение на нагрузке. По результатам проверки включается зеленый светодиод и устанавливается угол заполнения ШИМ, исходя из табличных значений. Во время стабилизации напряжения на нагрузке, один раз за восемь циклов работы преобразователя проверяется выходное напряжение. По результатам проверки с помощью таблицы формируется угол открытия транзистора ШИМ. При большем напряжении нагрузки угол ШИМ уменьшается, при меньшем — увеличивается.
На нагрузку подается постоянное напряжение с заметной пульсацией (см. рис. 8.2). Пульсация напряжения обусловлена работой АЦП, при которой невозможно изменять угол регулирования ШИМ. Этот недостаток можно компенсировать, установив линейный стабилизатор на выходе или дополнительный дроссель.
В случае большой пульсации напряжения на нагрузке ниже или выше 50% от нормы преобразователь прекращает ШИМ, программа переходит в подпрограмму Error, загорается красный светодиод. Подпрограмма Error обнуляет вывод управления микроконтроллера РВ1 транзистором преобразователя и включает таймер ТО на отсчет времени 0,16 с. Если за это время условия нагрузки изменились, микроконтроллер формирует одиночный импульс. По результатам проверки выходного напряжения с помощью АЦП запускается начальная подпрограмма, и весь цикл запуска и стабилизации повторяется заново, или, если напряжение на нагрузке равно нулю, запускается подпрограмма Error.
В рассмотренной программе алгоритм проверки и аварийной остановки имеет упрощенную версию, поскольку основан на простой форме реализации. Но даже простой алгоритм предотвращает выход из строя элементов схемы.
Плата
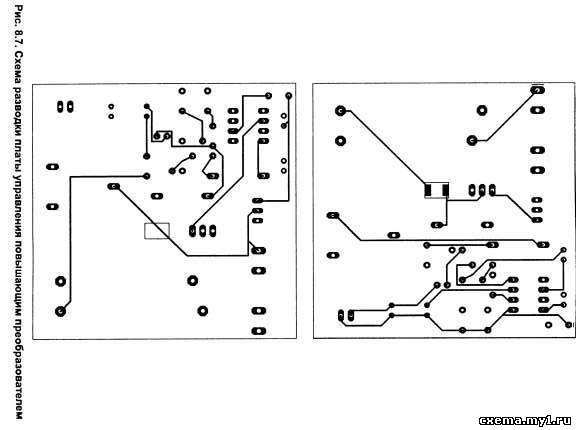
Монтажная схема платы представлена на рис. 8.6, а схема разводки с двух сторон — на рис. 8.7. Плата изготавливается из двухстороннего текстолита или на макетной плате (см. рис. 8.3). Существует два варианта изготовления печатной платы:
• по габаритам стандартного ба!арейного отсека размерами 56x32 мм (батарейный отсек крепится на задней стороне платы);
• батарейный отсек и колодка предохранителя крепятся непосредственно на монтажную плату (как на рис. 8.6).
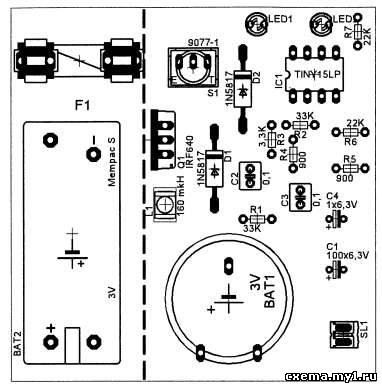
Рис. 8.6. Монтажная схема платы управления повышающим преобразователем
Все элементы преобразователя, а также батарейный отсек 1 находятся на монтажной плате. Индуктивность наматывается на изолированном ферритовом стержне (рис. 8.8). Количество витков соответствует расчетным значениям из таблицы Расчет параметров повышающего преобразователя. xls. Автор выполнил расчеты для разных размеров ферритового сердечника 600НН с магнитной индукцией 0,31 Тл, индуктивность дросселя 376 мкГн. Для ферритового стержня диаметром 4 мм и длиной 4 см необходимо намотать 118 витков проводом ПЭЛ-0,01. После намотки витков их следует зафиксировать на концах. Наматывается провод на изолированную основу от ферритового стержня. В качестве изолятора хорошо подходит тефлоновая лента (применяется в сантехнике).
Если во время эксплуатации функция контроля источника не нужна, можно отказаться от батареи 1 или не вставлять батарейку в отсек. Выключатель источника питания можно сделать выносным. В качестве ба-
тарей иногда используют аккумуляторы. При этом время эксплуатации увеличивается более чем в два раза. Нагрузка подключается через провода к разъему SL1. Поскольку питание — полярное, то лучше использовать разноцветные провода.
Настройка
В качестве источника тока можно использовать элемент CR2032 [15] для батарейного отсека 1 и элемент А А или LR6 [14] для батарейного отсека 2. Время непрерывной работы преобразователя на полностью заряженных батареях составляет около 2,5 часов. Технология настройки преобразователя выполняется по европейским нормам.
Большинство радиолюбительских схем при повторении аматерами терпят неудачу. Анализ этих неудач показывает, что причиной является невнимательная сборка устройств, недостаточная точность настройки, отсутствие поэтапной проверки, отсутствие измерительных средств. Автор предлагает поэтапную проверку преобразователя.
1. Внимательно проследить все соединения с контроллером.
2. Записать в микроконтроллер тестовую программу для проверки правильности монтажа.
3. Включить питание на плату без микросхемы микроконтроллера и проверить напряжение питания на выводах 4-8 микроконтроллера.
4. При включенной плате без микроконтроллера закоротить поочередно выводы 4-5 и 4-7 панельки чшкроконтроллера. Должны засветиться поочередно зеленый и красный светодиоды.
5. После записи тестовой программы вставить микроконтроллер в панельку и включить преобразователь с нагрузкой в 10 кОм. Должны поочередно включаться зеленый и красный светодиоды, а транзи-
стор преобразователя — работать в прерывистом режиме генерации с частотой 40 кГц.
6. После прохождения теста можно перезаписать в микроконтроллер программу рабочую преобразователя (см. листинг. 8.1) и включить устройство с нормальной нагрузкой.
7. Проверка стабилизируемого напряжения на разных значениях нагрузки. Если напряжение не соответствует установленному значению, то изменяют коэффициент угла открытия транзистора. Для этого в таблице Расчет параметров повышающего преобразователя . xls (зеленый лист Коррекция) указаны значения напряжения на нагрузке и, соответственно, — данные угла ШИМ в виде НЕХ-кода. Если измеренные значения напряжения ниже заданного, то необходимо изменить НЕХ-код: для увеличения напряжения его уменьшают, а для уменьшения напряжения — увеличивают.
8. Повторное программирование микроконтроллера с новыми значениями НЕХ-кода. Эту операцию выполняют для всего диапазона изменения нагрузки, после чего поправочные коэффициенты записывают в память программ микроконтроллера.
Проверку параметров преобразователя необходимо выполнить несколько раз:
Вывод
Таблица Расчет параметров повышающего преобразователя, xls составлена для проверки параметров преобразователя на различных частотах и при разном йоведении источника и нагрузки. В инженерных расчетах использованы известные методики. Автор пришел к выводу, что наиболее оптимальная частота преобразователя — 40 кГц при тактовой частоте микроконтроллера Tiny 15 в 1,6 МГц. Если использовать микроконтроллер с более высокой тактовой частотой, то можно достичь частоты преобразователя 100 кГц при условии программирования на языке ассемблера.
Файлы к статье Повышающий преобразователь 3 В - 5 В на микроконтроллере

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!