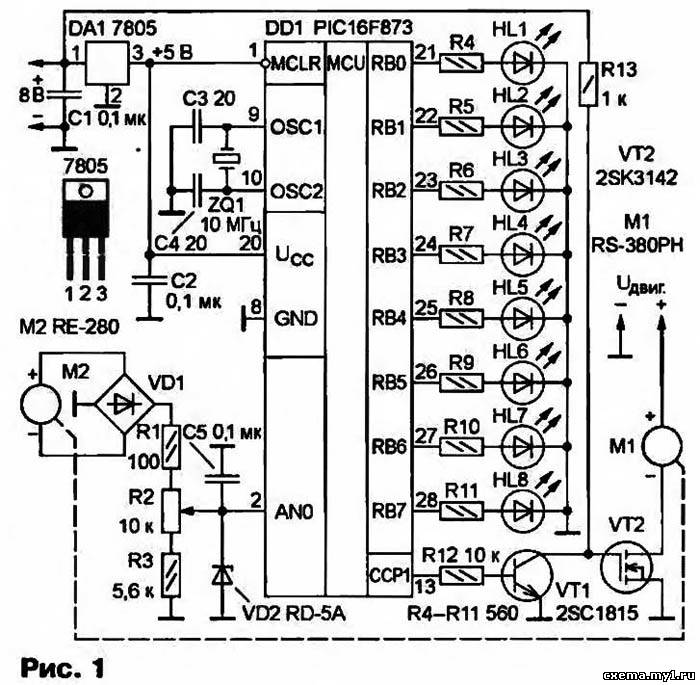
В этой подборке рассказывается о двух конструкциях на PIC-контроллере, описанных на веб-сайте японского радиолюбителя Seiichi Inoue. Первая из них предназначена для управления частотой вращения электродвигателя постоянного тока, вторая — шагового электродвигателя. Принципиальная схема регулятора частоты вращения вала электродвигателя постоянного тока показана на рис. 1. Устройство выполнено на микроконтроллере (МК) PIC16F873. Его тактовую частоту (10 МГц) задает кварцевый резонатор ZQ1. Питание на основной электродвигатель М1 подается через мощный полевой транзистор VT2, на затвор которого через согласующий каскад на транзисторе VT1 поступают прямоугольные импульсы с выхода ССР1 микроконтроллера. Частота импульсов постоянна а скважность можно изменять регулируя, таким образом, частоту вращения ротора двигателя. Вал электродвигателя М1 механически (через зубчатую двухступенчатую передачу 1:1) связан со вторым электродвигателем, который используется в качестве генератора. Вырабатываемое им напряжение через диодный мост VD1 и делитель напряжения R1 —R3 поступает на вход AN0 аналого-цифрового преобразователя, входящего в состав МК. Стабилитрон VD2 с напряжением стабилизации 5 В защищает этот вход от повреждения, конденсатор С5 сглаживает пульсации выпрямленного напряжения Требуемую частоту вращения устанавливают переменным резистором R2 с функциональной характеристикой А.
Рост напряжения, поступающего на вход AN0, свидетельствует о том, что частота вращения вала двигателя увеличивается В ответ на это МК уменьшает длительность импульсов на выходе ССР1, и частота вращения возвращается к прежнему значению. При уменьшении напряжения, вырабатываемого двигателем-генератором, длительность импульсов возрастает и частота вращения повышается. Линейка светодиодов HL1— HL8 позволяет визуально контролировать частоту вращения вала двигателя: число светящихся светодиодов растет с ее увеличением Питается устройство стабилизированным напряжением 5 В снимаемым с выхода интегрального стабилизатора DA1. На двигатель М1 поступает нестабилизированное напряжение от отдельного источника.
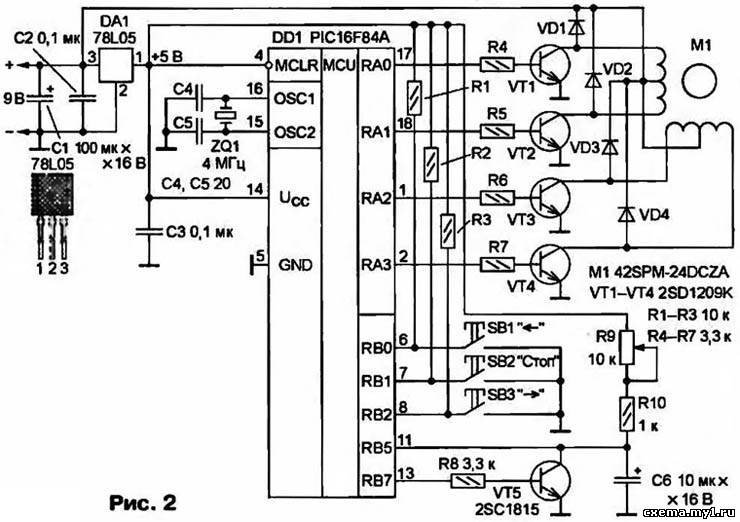
Регулятор собран на макетной плате размерами 70x45 мм. Устройства управления шаговым двигателем обычно содержат сдвиговые регистры, формирующие необходимую последовательность импульсов, поступающих на обмотки Предлагаемое устройство на PIC контроллере позволяет также изменять направление и регулировать частоту вращения ротора. Принципиальная схема устройства изображена на рис. 2. Основной служит МК PIC16F84A. Тактовую частоту (4 МГц) задает кварцевый резонатор ZQ1 На элементах R8—R10, С6 и транзисторе VT5 собран генератор, частоту которого можно плавно изменять переменным резистором R9 с функциональной характеристикой А. Напряжение с конденсатора С6 поступает на вход RB5 МК DD1 После того как оно превысит пороговое, на выходе RB7 появляется напряжение высокого уровня Открывшийся транзистор VT5 разряжает конденсатор после чего цикл повторяется. При перемещении движка резистора R9 из одного крайнего положения в другое частота вращения двигателя М1 изменяется от 27 до 128 мин<sup>-1</sup>. Следует учесть, что при увеличении частоты вращения снижается момент на валу двигателя. Устройство не имеет обратной связи поэтому частота вращения зависит как от сопротивления введенной части резистора R9 так и от нагрузки на валу.
Выходы RAO—RA3 МК через ключи, выполненные на составных транзисторах VT1—VT4, коммутируют напряжения на обмотках шагового двигателя Диоды VD1—VD4 защищают транзисторы от пробоя импульсами напряжения, возникающими в момент их закрывания К первым трем разрядам порта RB (RB0—RB2) МК подключены кнопки SB1—SB3, с помощью которых изменяют направление вращения вала двигателя и останавливают его Все детали (за исключением двигателя и переменного резистора) смонтированы на макетной плате размерами 70x45 мм. Внешний вид устройства показан на рис. 3 Стабилизаторы 78L05 и 7805 заменимы отечественными КР142ЕН5А (В) транзистор 2SC1815 — любым из серии КТ3102, стабилитрон RD-5A - отечественным КС 147А Транзисторы VT1—VT4 (см рис 2) должны выдерживать ток обмоток двигателя и иметь коэффициент передачи тока базы около 4000 Выпрямительный мост VD1 (см. рис 1)— КЦ407А или собранный из маломощных кремниевых диодов. Светодиоды HL1—HL8 — любые из серии А/1307.
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!