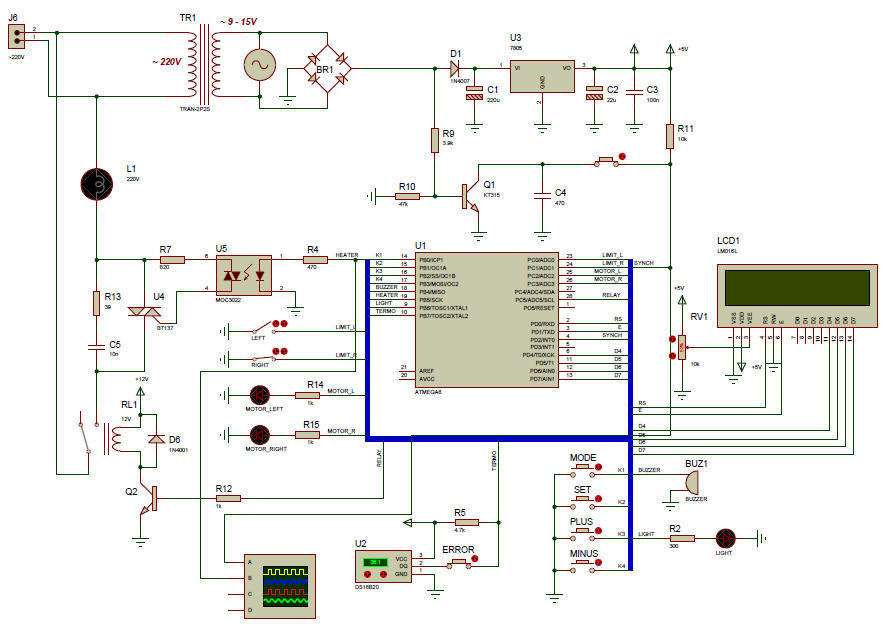
Схема.
скачать
Прошивка, файлы проекта, печатные платы и схема в формате PDF
Описание работы.
Терморегулятор предназначен для поддержания заданной
температуры в инкубаторе с функцией переворачивания лотков.
Тип регулятора – ПИД. При перегреве включается
дискретное регулирование при помощи аварийного реле. В этом случае нагреватель отключается
по достижению максимальной температуры, а включается при снижении ее ниже
максимальной на величину гистерезиса.





Температура измеряется в диапазоне -55,0 ÷ 125,0 оС.
На дисплей выводится только положительная температура 0,0 ÷ 99,9 оС.
Если температура отрицательная, или выше 99,9 оС, или произошла
ошибка датчика на дисплей выводятся прочерки. Раздаются прерывистые звуковые
сигналы (если звук активирован). Терморегулятор продолжает свою работу, за
исключением случая ошибки датчика – нагреватель при этом отключается.
При отсутствии синхроимпульсов на месте индикации
выходной мощности выводятся прочерки, ПИД-регулирование отключается.
Если отклонение температуры стало больше на величину,
заданную в настройках (диапазон установки 0,1 ÷ 9,9 оС), включаются
прерывистые звуковые сигналы (если звук активирован).
Диапазон устанавливаемой температуры 0,0 ÷ 99,9 оС.
При нажатии на кнопки короткий звуковой сигнал.
При включении питания, а также при нажатии на кнопки
автоматически включается подсветка. Подсветка отключается через 30 сек.
Установка.
Нажатием на SET
производится листание страниц меню. Кнопкой MODE выбор параметра для установки в пределах страницы.
Кнопками PLUS/MINUS
устанавливается выбранный параметр.
Коррекция
температуры.
Для обеспечения точности показаний предусмотрена
цифровая коррекция температуры. К измеренному значению температуры добавляется
или вычитается значение коррекции. Коррекция возможна в пределах ±0,0 ÷ 9,9 оС.
Коррекция применяется только для положительных температур.
ПИД регулятор.
zP – зона пропорциональности.
pG – пропорциональный коэффициент.
dG – дифференциальный коэффициент.
iG – интегральный коэффициент.
Регулятор сравнивает значение температуры
с заданием и вычисляет ошибку.
Ошибка (с учетом знака) накапливается в
сумматоре ошибки. Сумматор ограничен величиной ±zP. Интегральная составляющая регулятора вычисляется
умножением значения сумматора на iG. Таким образом, интегральная составляющая делает
регулятор инерционным.
Пропорциональная составляющая
вычисляется умножением значения ошибки на коэффициент pG. Прямое
воздействие на регулятор.
Дифференциальная составляющая
вычисляется вычитанием новой ошибки из предыдущей и умножением разницы на
коэффициент dG. Дифференциальная составляющая определяет с какой
скоростью идет изменение параметра и в каком направлении.
Все составляющие суммируются с учетом
знаков и преобразуются в величину, определяющую угол открытия симистора.
Переворачивание
лотка.
Максимальное время 9 часов 59 минут.
Формат отображения Ч.ММ.
При подаче питания таймер находится в
основном режиме:
–
двигатель отключен, но, если ни один из конечных выключателей не замкнут, то
включается вращение вправо до срабатывания выключателя;
–
ведется отсчет времени;
–
на индикаторе оставшееся время;
–
разделительная точка мигает;
–
символ > на индикаторе
обозначает, что поворачивание будет вправо, символ < – влево.
Нажатие на кнопки PLUS
или MINUS из основного режима включает вращение двигателя
вправо и влево соответственно, если это не запрещено конечными выключателями.
Таймер сбрасывается, начинается новый отсчет. Двигатель
работает, пока нажата кнопка или пока не сработает конечный выключатель.
По истечении заданного времени
включается двигатель. Направление
вращения определено конечными выключателями. Начинается новый отсчет времени.
Двигатель продолжает работу до
срабатывания соответствующего конечного выключателя.
Состояние, когда оба конечных
выключателя замкнуты, считается ошибкой. На индикаторе в месте символа направления
вращения знак ?.
Файлы к статье Инкубатор

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!