Драйверы бесщеточных двигателей постоянного тока способствуют развитию двигателей BLDC. Но для их управления обычно требуется информация о положении ротора for, выбирающая соответствующий угол коммутации. Обычно для определения положения ротора используется датчик Холла.
Но в чувствительных к стоимости приложениях часто желательна схема коммутации без датчиков. Описанная здесь схема драйвера бесщеточного двигателя постоянного тока использует микросхему драйвера DRV10866 для управления небольшим вентилятором BLDC без использования каких-либо датчиков положения. Скорость вентилятора BLDC можно плавно изменять, без обычных шагов, присущих обычному вентилятору переменного тока.
Рис. 1. Компоненты драйвера бесщеточного двигателя постоянного тока
Схема драйвера бесщеточного двигателя постоянного тока
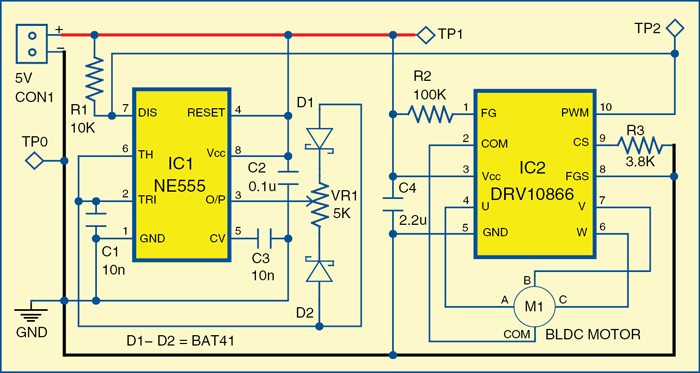
Рис. 2 shows the circuit of a sensor-less BLDC motor driver. Схема построена на основе NE555 (IC1), DRV10866 (IC2) и нескольких других компонентов.
Рис. 2. Схема драйвера бесщеточного двигателя постоянного тока
ИС драйвера DRV10866 от Texas Instruments используется для управления небольшим трехфазным двигателем BLDC (M1). Схема представляет собой трехфазный драйвер двигателя без датчиков со встроенными силовыми МОП-транзисторами с пиковым током возбуждения до 680 мА.
DRV10866 специально разработан для for приводов вентиляторов с низким уровнем шума и малым количеством компонентов. Для управления трехфазным двигателем используется схема противоэдс без датчика 150°.
Подтягивающий резистор номиналом 100 кОм (R2) используется на выводе 1 микросхемы IC2. Контакты 2, 4, 7 и 6 микросхемы IC2 подключены к общему проводу фазы A, фазы B и фазы C двигателя BLDC соответственно. Вывод 10 IC2 подключен к выводу 7 IC1 для получения широтно-импульсного модулированного (PWM) сигнала от IC1 для управления скоростью двигателя BLDC.
Выходной сигнал (PWM) доступен на контакте 7 (DIS) микросхемы IC1, а не на обычном выходном контакте 3 микросхемы. Рабочий цикл сигнала PWM 25 кГц (приблизительно) можно регулировать от 5% до 95% с помощью потенциометра VR1.
Скоростью двигателя BLDC можно управлять, изменяя рабочий цикл сигнала PWM. Поворот VR1 против часовой стрелки снижает рабочий цикл, что, в свою очередь, снижает скорость двигателя, и наоборот.
Рис. 3. Точки проверки драйвера бесщеточного двигателя постоянного тока
Создание и тестирование
Односторонний PCB for драйвер бесщеточного двигателя постоянного тока показан на рис. 4, а расположение его компонентов — на рис. 5.
Соберите схему на рекомендованном PCB, чтобы минимизировать ошибки сборки. IC2 должен быть установлен на стороне пайки PCB.
Рис. 4. Односторонний PCB for драйвер бесщеточного двигателя постоянного тока
Рис. 5. Компоновка компонентов for PCB
Загрузить PCB и PDF-файлы компоновки компонентов:нажмите здесь
После сборки компонентов подключите источник питания 5 В постоянного тока к разъему CON1. Чтобы проверить правильность функционирования схемы драйвера бесщеточного двигателя постоянного тока for, проверьте правильность подачи напряжения 5 В for на цепь TP1 по отношению к TP0. Поверните VR1 по часовой стрелке или против часовой стрелки, чтобы увеличить или уменьшить скорость двигателя.
Чтобы увидеть больше интересных схемных проектов: нажмите здесь
Автор – бакалавр технических наук (электроника и связь) из GGSIPU, Нью-Дели
Эта статья была впервые опубликована 6 февраля 2017 года и обновлена в 2026 году.
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!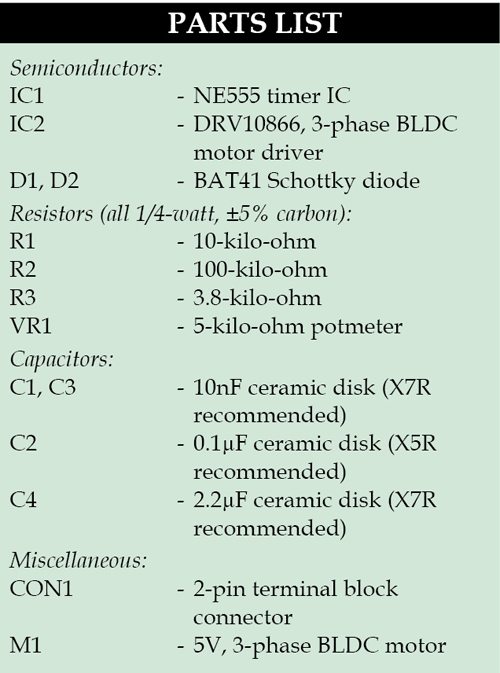



{kind=link}