Здесь представлена концепция управления различными серводвигателями с помощью платы Arduino Uno в забавном проекте под названием «Приветствие намасте» робот». Робот поворачивает голову на 180° и сканирует людей в радиусе действия с помощью ультразвукового модуля. Если он находит кого-то поблизости, он приветствует человека «намасте», сжимая обе руки вместе, что является традиционным индийским способом пожелать людям. Робот может использоваться в офисах, торговых центрах, парках и залах для вечеринок, где он может приветствовать и привлекать людей.
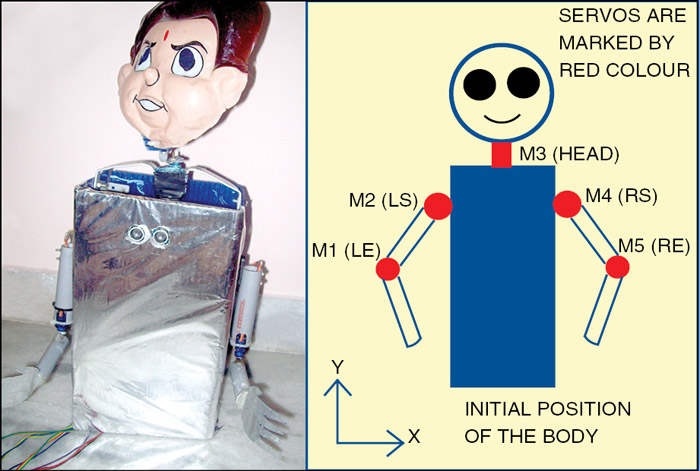
Рис. 1 показан авторский прототип этого робота. Обратите внимание, что в авторском прототипе ультразвуковой модуль установлен на груди, но при тестировании было замечено, что if установлен на глазах, он может сканировать гораздо большую территорию в окрестностях.
Схема и работа
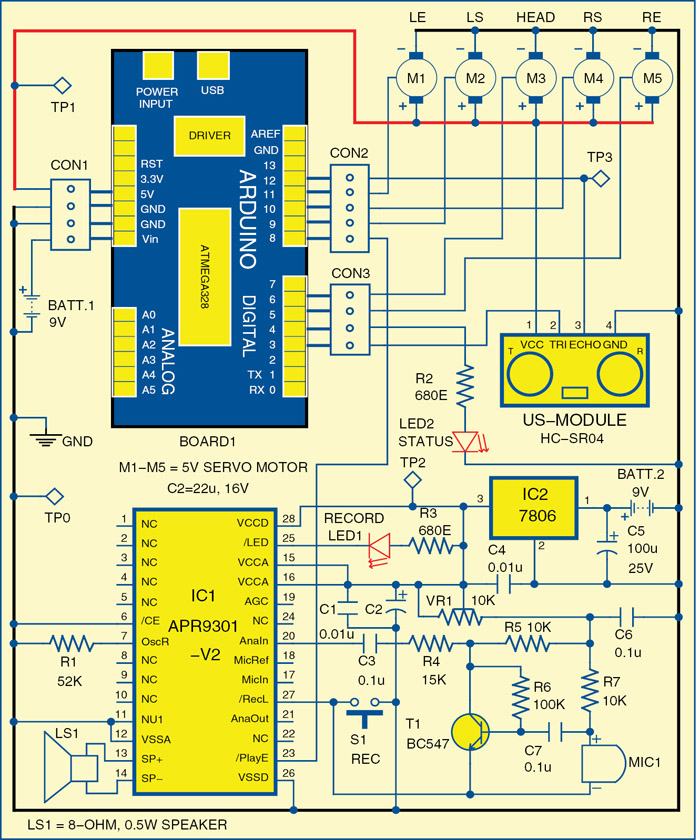
Рис. 2 показана принципиальная схема робота-приветствия намасте. Серводвигатели от M1 до M5 используются для движения локтей, плеч и головы. Плата Arduino Uno (Board1) использует библиотеку Servo.h для управления этими серводвигателями. Как уже упоминалось, серводвигатель головки продолжает вращаться на 180°. Ультразвуковой модуль HC-SR04 устанавливается на глаза и сканирует любые объекты поблизости. Запись и воспроизведение аудиосообщения «намасте» осуществляется с помощью микросхемы APR9301 (IC1).
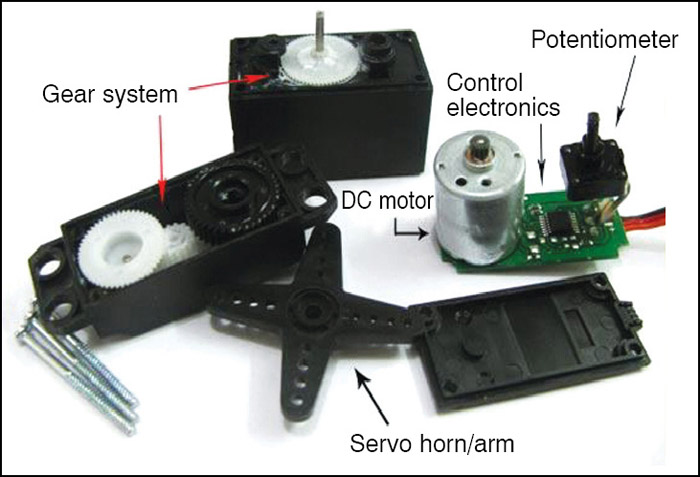
Серводвигатели. Эти двигатели чрезвычайно полезны в робототехнике. Они небольшие, но чрезвычайно мощные для своего размера. Серводвигатель в основном состоит из двигателя постоянного тока, зубчатой передачи, датчика положения (в основном потенциометра) и управляющей электроники, как показано на рис. 3.
Двигатель постоянного тока соединен с зубчатым механизмом, который обеспечивает обратную связь с датчиком положения. Потенциометр позволяет схеме управления контролировать текущий угол серводвигателя. Если вал расположен под правильным углом, двигатель отключается. Если схема обнаруживает, что угол неправильный, она сохраняет двигатель включенным до тех пор, пока угол не будет достигнут. Обычный сервопривод используется для достижения углового движения до 180°; он не может двигаться дальше из-за механического упора на главной выходной шестерне.
Провод управления используется для передачи угла поворота. Угол определяется длительностью импульса, подаваемого на управляющий провод. Это называется импульсно-кодовой модуляцией. Провода управления двигателями от М1 до М5 подключаются к контактам 11, 9, 6, 10 и 5 платы 1 соответственно.
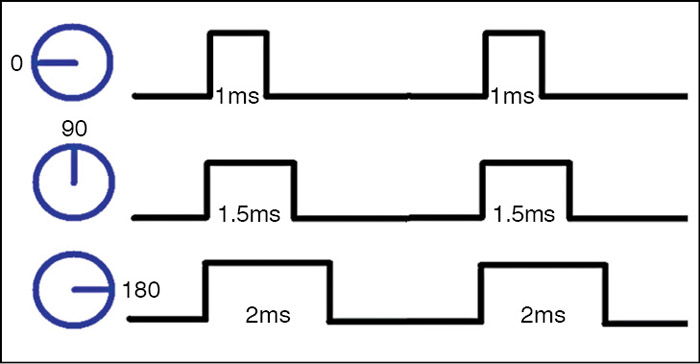
Сервопривод ожидает 2-миллисекундный импульс каждые 20 миллисекунд (0,02 секунды). Длительность импульса определяет, насколько далеко вращается двигатель. Например, импульс длительностью 1,5 миллисекунды заставит двигатель повернуться во фронтальное положение на 90° (часто называемое нейтральным положением). Если импульс короче 1,5 миллисекунды, вал двигателя повернется менее чем на 90°. Если длительность импульса превышает 1,5 миллисекунды, вал повернется ближе к 180°, как показано на рис. 4.
Рис. 4: Положение сервопривода
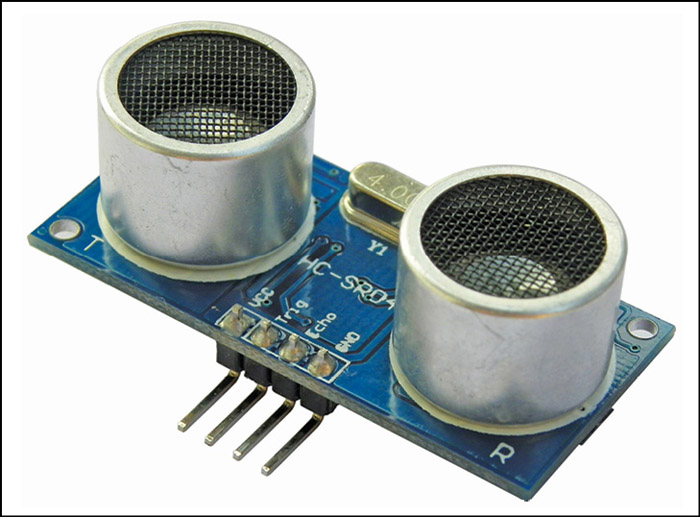
Модуль ультразвукового приемопередатчика (HC-SR04). Модуль ультразвукового приемопередатчика HC-SR04 использует сонар для определения расстояния до объекта, как это делают летучие мыши или дельфины. Он обеспечивает превосходное бесконтактное обнаружение на расстоянии от 2 см до 400 см с высокой точностью и стабильными показаниями в простом в использовании корпусе. Он поставляется в комплекте с ультразвуковым передатчиком и приемным модулем. На рис. 5 показан ультразвуковой модуль.
Рис. 5: Ультразвуковой модуль HC-SR04
Чтобы начать измерение, на контакт 2 (TRIG) модуля должен поступать высокий импульс в течение не менее 10 микросекунд. Это заставит модуль передать восемь циклов ультразвукового импульса с частотой 40 кГц и дождаться отраженного ультразвукового импульса. Когда датчик обнаруживает отраженный импульс, он устанавливает на контакте 3 (ECHO) высокий уровень. Задержка получения отраженного импульса указывает расстояние до препятствия, которое можно легко рассчитать как:
Расстояние (в сантиметрах) = T/58
Где:
T = ширина импульса на выводе ECHO в микросекундах
Выводы TRIG и ECHO модуля подключены к контактам 3 и 12 платы Board1 соответственно.
ИС для записи и воспроизведения голоса (APR9301-V2). Это высококачественная микросхема записи и воспроизведения голоса. Продолжительность записи сообщения зависит от номинала внешнего резистора R1, подключенного к его выводу 7. Режимы работы описаны ниже.
Режим записи. При нажатии switch S1 светодиод 1 загорается, указывая на то, что запись началась. Теперь вы можете говорить рядом с микрофоном MIC1, чтобы записать свой массаж (в нашем case «намасте»). IC1 остается в режиме записи до тех пор, пока нажата switch S1 и контакт 27 IC1 заземлен. Запись прекращается через 20 секунд (выбрано сопротивлением 52 кОм в этом case), вывод 25 IC1 становится «высоким», а светодиод 1 перестает светиться.
Продолжительность времени записи может быть увеличена или уменьшена в зависимости от номинала резистора R1 следующим образом:
38 кОм в течение 16 секунд
52 кОм в течение 20 секунд
67 кОм в течение 24 секунд
75 кОм в течение 30 секунд
Режим воспроизведения. Когда на контакте 23 на мгновение устанавливается низкий уровень, записанное сообщение воспроизводится с самого начала и его можно услышать через динамик LS1.
Режим ожидания. Вывод 6 микросхемы IC1 поддерживается на низком уровне, поэтому после завершения записи и воспроизведения он возвращается в режим ожидания. Если на контакте 6 высокий уровень, он будет находиться в режиме пониженного энергопотребления, запись и воспроизведение невозможны, а потребляемый ток обычно составляет менее одного микроампера.
Arduino Uno плата. Arduino — это платформа для прототипирования электроники с открытым исходным кодом, основанная на гибком и простом в использовании аппаратном и программном обеспечении. Он предназначен для художников, дизайнеров, любителей и всех, кто интересуется созданием интерактивных объектов или окружающей среды. Arduino Uno — плата на базе микроконтроллера ATmega328. Он состоит из 14 контактов цифрового ввода/вывода, шести аналоговых входов, разъема USB для программирования встроенного микроконтроллера, разъема питания, разъема ICSP и кнопки сброса. Он управляется кварцевым генератором с частотой 16 МГц и содержит все необходимое для поддержки микроконтроллера. Его очень легко использовать, так как для начала пользователю просто нужно подключить его к компьютеру с помощью кабеля USB или подать питание с помощью адаптера переменного тока в постоянный или аккумулятора. Микроконтроллер на плате запрограммирован с использованием языка программирования Arduino и среды разработки Arduino.
Пин 4 платы Board1 подключен к светодиоду 2, который загорается, когда робот обнаруживает кого-то и приветствует «намасте». Контакт 8 подключен к контакту 23 IC1 для воспроизведения записанного сообщения. На этом контакте устанавливается низкий уровень, когда робот обнаруживает кого-то через ультразвуковой модуль.
В схеме используются две батареи напряжением 9 В: одна для питания платы Arduino (Board1), а другая для питания схемы записи и воспроизведения, как показано на рис. 2. Регулируемое питание 5 В для сервоприводов и ультразвукового модуля обеспечивается самой платой Arduino. Светящийся LED на плате 1 указывает на наличие источника питания.
Программное обеспечение
Программное обеспечение робота написано на языке программирования Arduino. Плата Arduino Uno программируется с использованием программного обеспечения Arduino IDE. Atmega328 на плате Arduino Uno поставляется с загрузчиком, который позволяет загружать в него новый код без использования внешнего аппаратного программатора. Он обменивается данными по протоколу STK500. Вы также можете обойти загрузчик и запрограммировать микроконтроллер через заголовок внутрисхемного последовательного программирования (ICSP), но использование программирования загрузчика выполняется быстро и легко.
Выберите нужную плату в меню «Инструменты → Плата» в Arduino IDE и запишите программу (эскиз) через стандартный порт USB компьютера.
Создание и тестирование
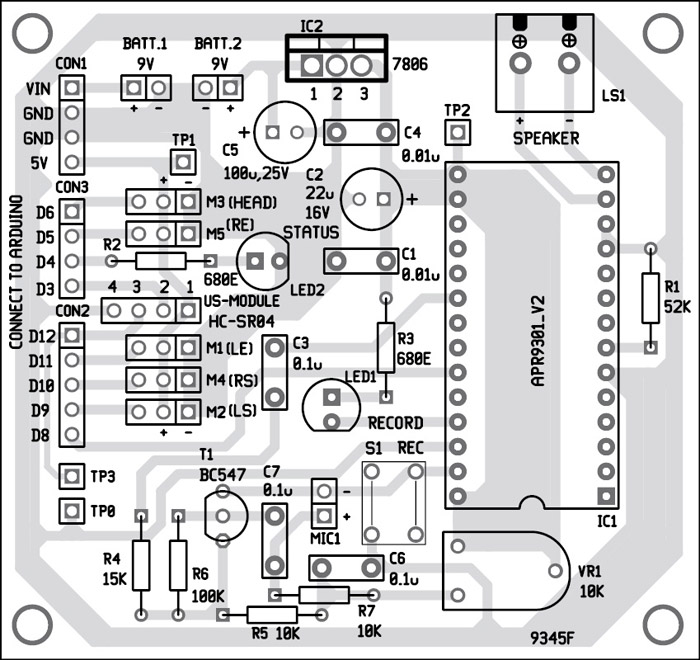
Односторонний PCB реального размера для схемы робота намасте показан на рис. 6, а схема его компонентов — на рис. 7. Соберите схему на PCB, чтобы сэкономить время и свести к минимуму любые ошибки сборки. Запрограммируйте плату Arduino с помощью программного обеспечения, представленного на EFY DVD и на source.efymag.com, и подключите ее к собранному PCB, как показано на рис. 2.
Рис. 6. Односторонний PCB в натуральную величину для робота-приветствия намастеРис. 7: Компоновка компонентов для PCB
Загрузите PDF-файлы PCB и компоновки компонентов: нажмите здесь
Включите систему записи и воспроизведения с помощью батареи 9 В, подключенной к разъему BATT.2. Теперь нажмите и удерживайте switch S1, чтобы записать сообщение. Подключите все серводвигатели и ультразвуковой модуль, а также включите питание секции Arduino, подключив еще одну 9-вольтовую батарею к BATT.1. Теперь робот готов к работе.
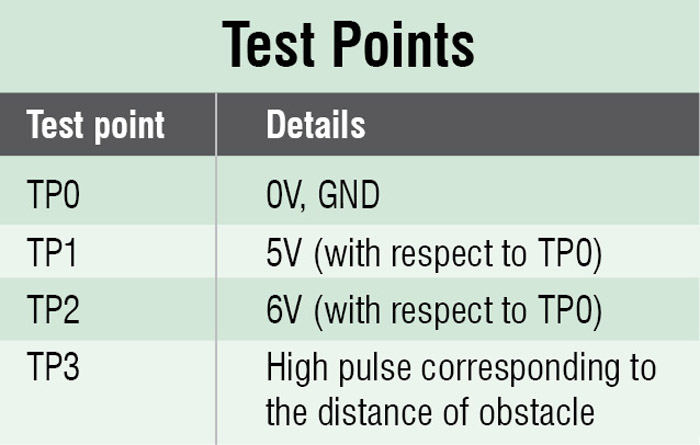
Чтобы проверить правильность функционирования схемы, проверьте контрольные точки, как указано в таблице тестовых точек.
Соображения и улучшения
Приложения: этот робот может работать как гостеприимный администратор, улучшая взаимодействие с пользователем в различных ситуациях.
Настройка: пользователи могут изменить приветственное сообщение или добавить новые жесты для улучшения интерактивности.
Расширение: будущие версии могут включать AI для расширенного распознавания и ответов.
Образовательный инструмент: этот проект можно использовать в качестве учебного ресурса на семинарах по робототехнике и программированию.
Автор — студент последнего курса бакалавриата по специальности электроника и коммуникация в Технологическом институте NRI, Виджаявада (Андхра-Прадеш)
Проект был впервые опубликован 11 января 2015 г. и недавно обновлен 30 октября 2024 г.
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Файлы
Файлы Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!