Если Вы смотрели кинофильм "Назад в будущее", то наверняка помните момент как механизм в доме доктора Брауна открывает консервную банку для кота и вываливает ее содержимое в тарелку на полу. Кота из кинофильма эта еда, однако, не слишком привлекала, т.к. в ней скопилась буквально гора мяса. Такой номер не прошел-бы с нашим котом, т.к. он ест все в любых количествах до поплохения. Особо остро обстоит проблема с кормежкой по утрам, т.к. кот требует еды между 6 и 7 утра. В будни это не проблема, поскольку мы все-равно встаем в это время, однако по выходным хочется поспать подольше. Вот так и родилась идея сделать автоматическую кормушку. Конечно, подобные аппараты продаются в магазинах для ухода за животными, но стоят они там неадекватно дорого. Описываемую здесь конструкцию нельзя назвать законченным устройством, рекомендованным для повторения в таком виде. Скорее это обмен опытом о том как делать стоит и что делать не следует. Однако, она исправно работает на протяжении уже нескольких лет и я ее считаю одним из самых своих полезных поделок, и не представляю как мы жили без нее раньше.
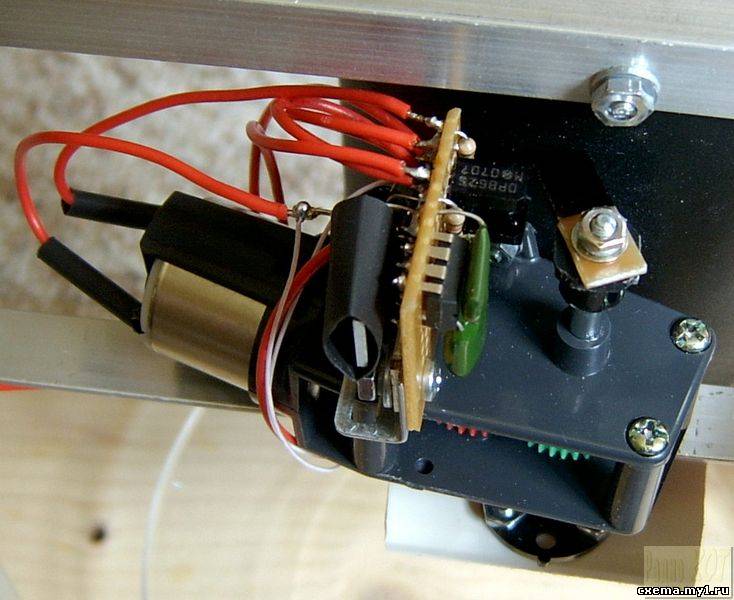
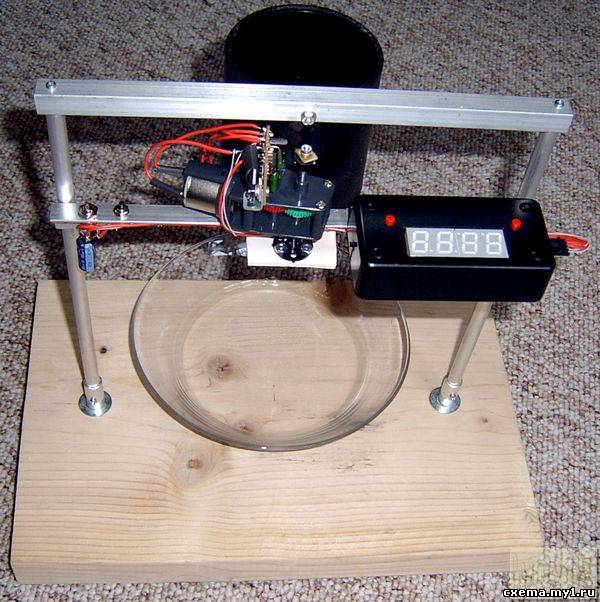
Кормушка рассчитана на одну кормежку сухим кормом. Устройство ее должно быть понятно из фотографий. Корм засыпается сверху в пластиковую черную трубку, дно которой прикрыто пластиковой крышкой. Крышка вращается электромотором с редуктором, расположенным за трубкой. При вращении крышки корм высыпается в тарелку кота. Крышка совершает один полный оборот, и за это время корм успевает полностью высыпаться. Включение электромотора в определенное время производится электронной схемой на основе часов с будильником. В качестве шасси использованы горизонтальные дюралюмиевые уголки высотой 12 мм и вертикальные круглые стойки диаметром 12 мм из того-же материала. В нижней части стоек (под деревянным основанием) нарезана резьба и привинчены гайки соответствующего диаметра для надежного фиксирования стоек. Гайки утоплены в тело древесины и не выступают под ее нижней поверхностью. Уголки крепятся на вертикальных стойках с помощью болтов М3, для чего под них в стойках нарезана резьба.

Электронный блок с индикаторами помещен в пластиковый корпус подходящих размеров. В корпусе проделаны отверстия под индикаторы и (красные) кнопки установки текущего времени и времени кормления. В боковой части корпуса размещен ползунковый переключатель. В одном его положении кнопками устанавливают текущее время, а в другом - время следующего кормления. Все последующие кормления будут производиться с 24-часовым интервалом начиная с этого времени. Питание устройства производится от стандартного 9-вольтового выпрямителя, вмонтированного в штепсельную вилку (на фотографиях не показан). Выпрямитель подключается к устройству через разъем, установленный на нижнем уголке. К контактам разъема припаян конденсатор фильтра емкостью 1000 микрофарад. Рядом с разъемом питания установлена кнопка для экстренного открывания кормушки, которая также полезна в процессе налаживания.
Электромотор редуктора привода крышки управляется ШИМ-модулятором на основе микросхемы таймера серии 555 для дальнейшего замедления скорости вращения крышки. В результате полный оборот ее происходит примерно за 4 секунды. Выключение электромотора производится фото-прерывателем на плате ШИМ-модулятора, укрепленной на корпусе редуктора. Фото-прерыватель состоит из опто-пары фото-диода и фото-транзистора. Прерывание светового потока производится заслонкой из текстолита, укрепленной в верхней части оси редуктора. Часть заслонки, которая собственно прерывает световой поток, покрашена в черный цвет, т.к. иначе отражаемый заслонкой дневной свет мешает нормальной работе фото-прерывателя. Сигнал от прерывателя поступает в основной электронный блок и используется микроконтроллером для отключения ШИМ-модулятора до следующего времени кормления.
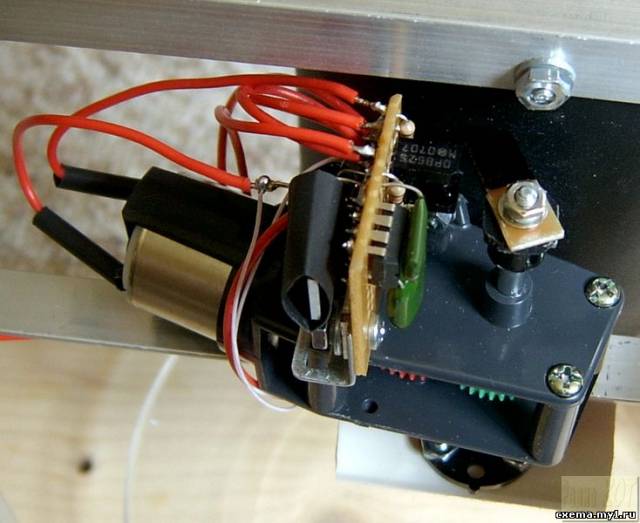
Положение заслонки фото-прерывателя на оси следует подобрать экспериментально. Дело в том, что даже при замедлении электромотора ШИМ-модулятором, после отключения мотора он продолжает немного вращаться по инерции и крышка поворачивается на некоторый угол. Таким образом, отключать мотор следует немного раньше до того, как крышка примет положение, полностью закрывающее дно трубки. Это звучит сложно, но на практике налаживание занимает пару минут, после чего все стабильно работает годами без подстройки.
Как видно из эскиза принципиальной схемы, электронный блок включает в себя часы реального времени на микросхеме PCA8565 с питанием от литиевой батареи типа CR2032, микроконтроллер PIC16F684, контроллер LED индикаторов SAA1064 и ключевые транзисторы для отключения блока индикации и электромотора. Необходимость в ШИМ-модуляторе для замедления мотора выяснилась после сборки и проверки устройства. Так как все выводы примененного микроконтроллера оказались занятыми, пришлось установить для этого отдельную микросхему таймера. Мотор и таймер питаются от отдельного стабилизатора на 5 В, который также обеспечивает развязку электромотора и остальной части схемы по питанию.
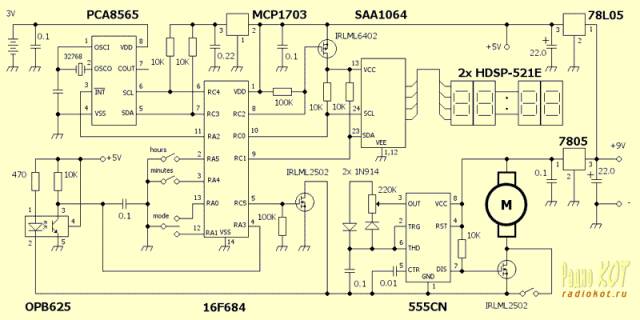
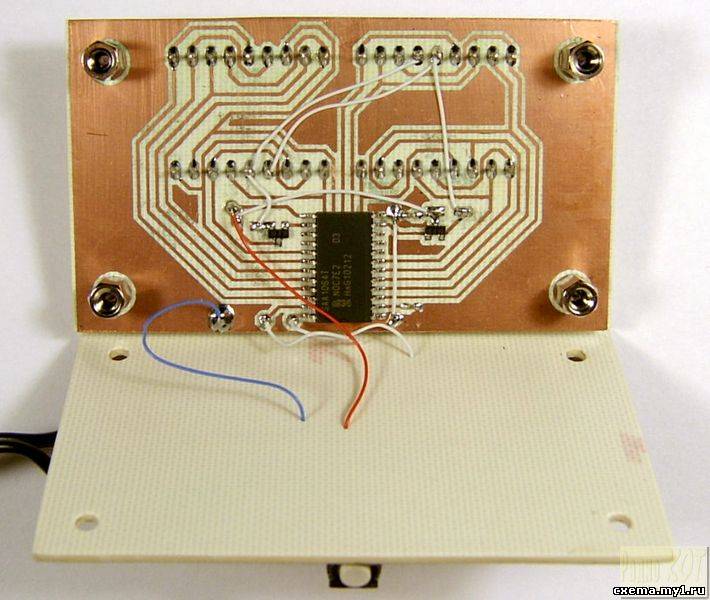
Контроллер дисплея и сам дисплей включаются только на короткое время порядка 10 сек при установке текущего времени и времени кормления. В остальное время индикаторы выключены.Выключение производится транзистором IRLML6402. Конструктивно электронный блок выполнен на двух платах, размещенных сэндвичем одна над другой. На одной из плат смонтирован контроллер дисплея SAA1064 и индикаторы. Микросхема SAA1064 включена по стандартной схеме из ее даташита. У меня нет фотографии оригинальной печатной платы блока индикации. Однако, ниже приведена фотография почти идентичной платы аналогичного назначения от другого устройства. Отличие состоит только в том, что на плате для кормушки дополнительно размещены кнопки установки времени, которые соединены проводами со второй платой.
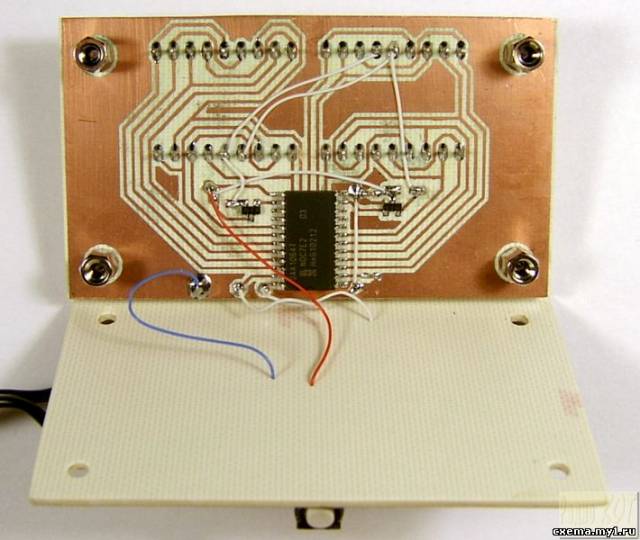
Остальные детали за исключением таймера и опто-прерывателя размещены на второй плате сэндвича. Эта плата разрабатывалась как экспериментальная с целью опробования микросхемы часов реального времени DS1337C с интегрированным кварцевым кристаллом. Эта микросхема питается от 3,3 В, поэтому для нее на плате (и на схеме) имеется стабилизатор MCP1703 на 3,3В. Однако, идея опробования не реализовалась на этой плате, и для работоспособности приведенной выше схемы стабилизатор MCP1703 не требуется и может быть исключен. На фотографии плата показана в момент программирования микроконтроллера, для чего к ней временно припаяны провода от разъема программатора.
В собранном виде до установки в корпус модуль электронного блока управления вылядит следующим образом.

Текущее время и время кормления запоминается в микросхеме часов реального времени. Запись времени в микросхему производистя микроконтроллером путем нажатия кнопок установки времени. По наступлении времени кормления на выводе 3 микросхемы появляется сигнал, вызывающий прерывание программы микроконтроллера. При этом напряжение на его выводе 5 поднимается от 0 до 5 В, что приводит к активизации таймера-модулятора ШИМ и вращению мотора. После этого микроконтроллер ожидает сигнал от фото-прерывателя на выводе 4. По получении сигнала напряжение на его выводе 5 падает до 0 и мотор отключается.
Вот, собственно, и все. Желающим сделать что-то подобное я-бы рекомендовал генерировать ШИМ микроконтроллером и объединить соответствующие шины интерфейсов I2C для связи с PCA8565 и SAA064 на выводах 6,7 и 9,10. Кроме того, вместо мотора с редуктором советую поставить шаговый двигатель. Это упростит процесс выключения мотора, т.к. для него нужно будет просто сгенерировать нужное число шаговых импульсов и тогда можно будет исключить фото-прерыватель и ШИМ-модулятор. Если в Вашей местности наблюдаются частые перебои с электричеством, можно добавить переключение на аварийное питание от батарей. Наконец, стоит накрыть редуктор крышкой, предохраняющей его от запыления.
Как показала практика с нашим котом, он ни разу не пытался опрокинуть кормушку с целью достать из нее корм. Сначала, чтобы предотвратить это, мы надевали на верхнюю часть трубки кормушки (с трением) пластиковую крышку от банки, но потом прекратили эту практику из-за ненадобности. Для Вашего животного это может быть необходимо.
Все, кому я показывал эту кормушку, советовали доработать ее до нескольких зарядок. Некоторые промышленные многоразовые кормушки обеспечивают доступ животного к корму путем окрывания отдельной двери для очередой порции. Другие снабжены весами и отмеряют каждый раз установленную заранее порцию корма, высыпающегося из контейнера над кормушкой. Одно время я думал сделать многозарядную кормушку револьверного типа с несколькими трубками. Блок трубок будет поворачиваться мотором и очередная трубка в момент кормления будет устанавливаться над тарелкой. Однако, руки до этого пока так и не дошли. Если у Вас есть другие идеи, буду благодарен за комментарии.
Файлы:
Прошивка МК с исходником.

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!