Продолжение.
Механизм
поворота мишени
При попадании луча
"лазерного пистолета" в "голову" мишени (точка 4, рис. 1)
сама мишень поворачивается на 90 градусов, а затем возвращается в прежнее
положение. Для осуществления этой операции предусмотрен механизм поворота.
Несущим элементом
для размещения деталей механизма поворота мишени и коммутирующих элементов
служит крышка корпуса. Крышка изготовлена из пластмассы. Габаритные размеры
крышки корпуса 0160 мм, толщина 5 мм.
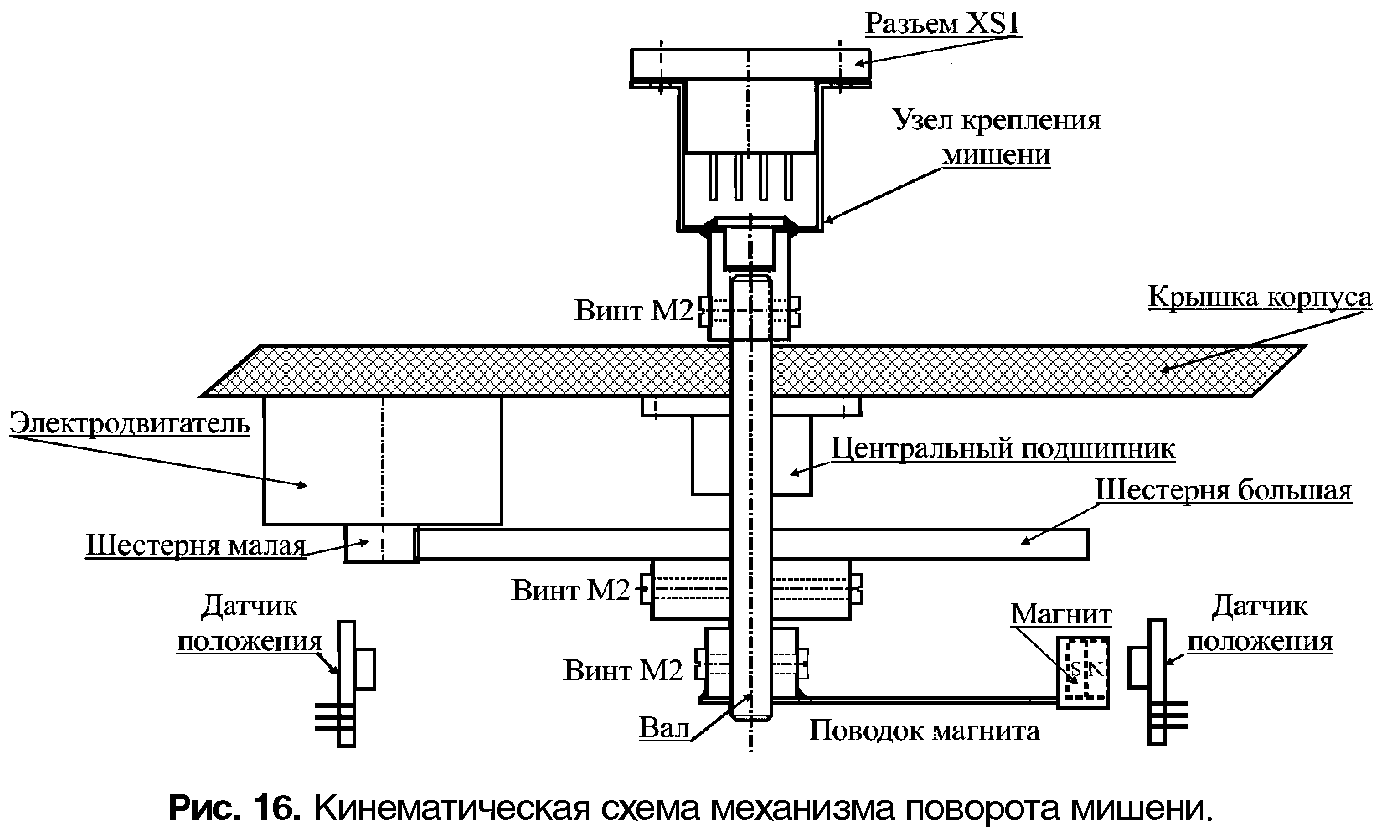
Кинематическая
схема механизма поворота мишени приведена на рис. 16.
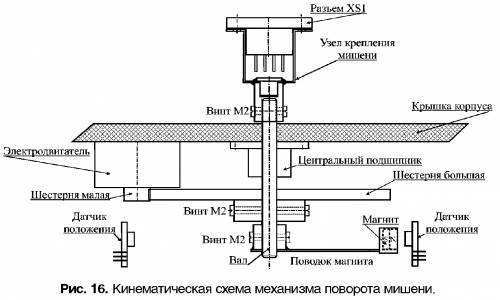
Кинематическая схема
поворота мишени функционирует следующим образом.
Движителем
механизма является электродвигатель, который при помощи малой шестерни
приводит в движении большую шестерню и мишень, установленные на общем валу.
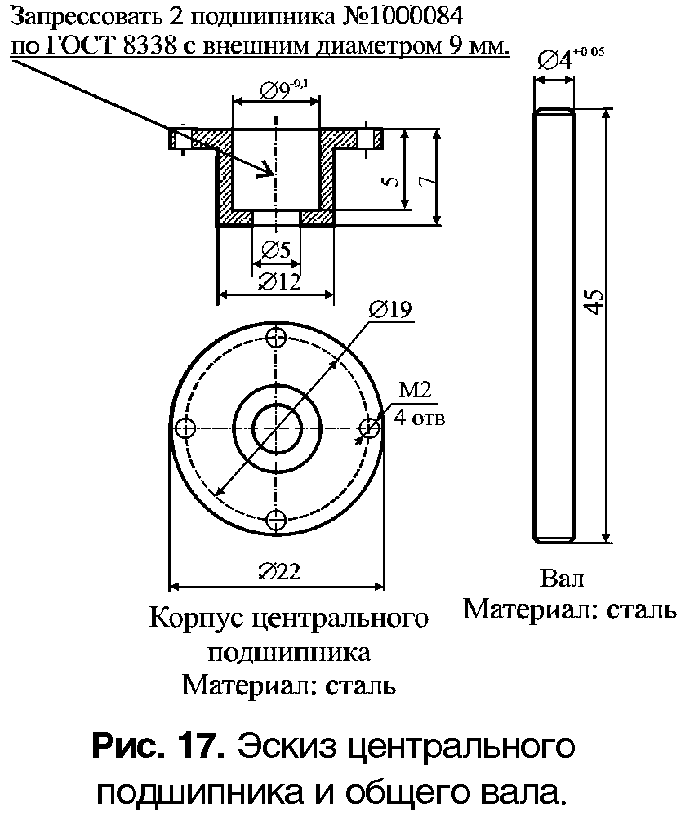
Общий вал
запрессован в центральный подшипник, установленный в середине крышки корпуса.
Эскиз центрального подшипника и вала приведены на рис. 17.
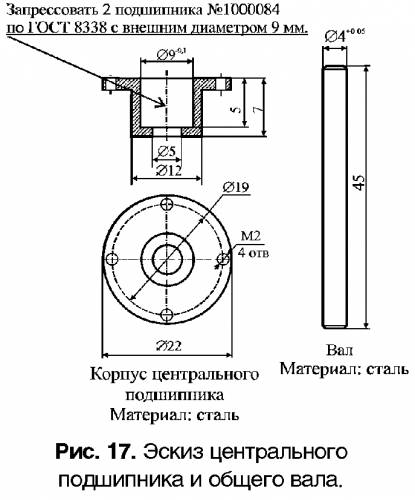
В корпусе
центрального подшипника запрессованы два однорядных радиальных подшипника
№1000084 по ГОСТ 8338 с внешним диаметром 9 мм и внутренним диаметром 4 мм.
В верхней части
вала размещается узел крепления мишени, а в нижней части - поводок постоянного
магнита.
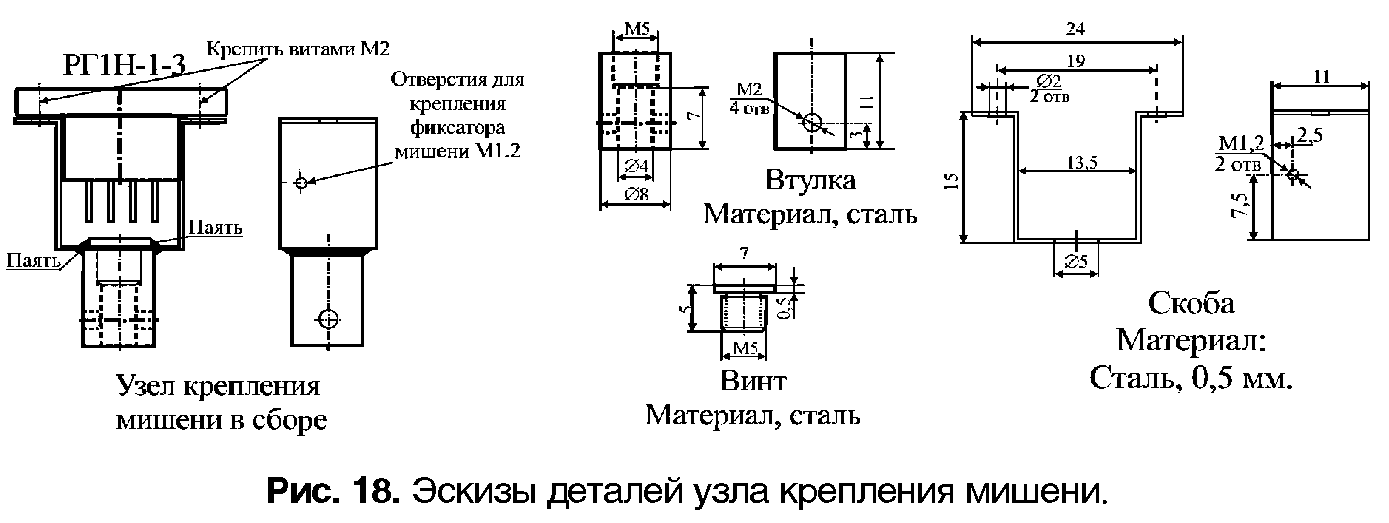
Электронная мишень
(рис. 1) устанавливается на узел крепления, эскиз которого приведен на рис.
18.

Узел крепления
мишени устанавливается на общий вал, где закрепляется при помощи винтов М2.
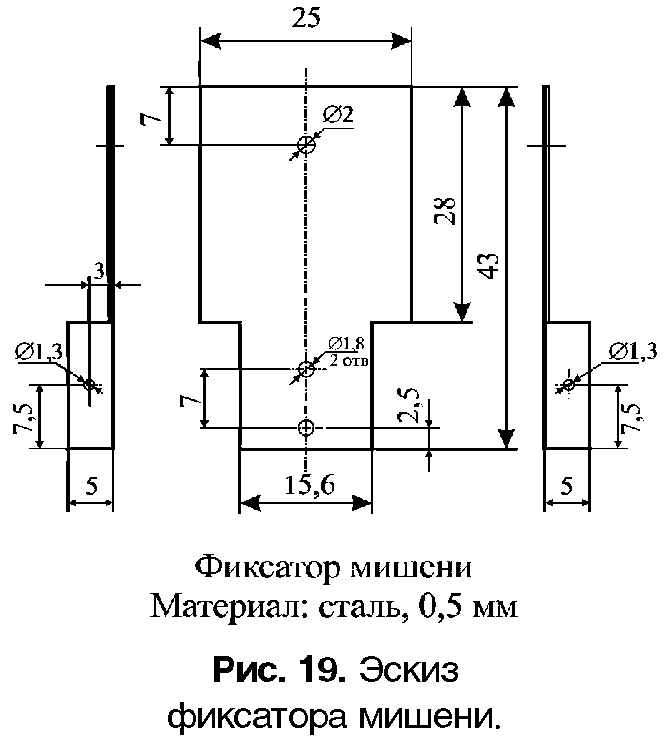
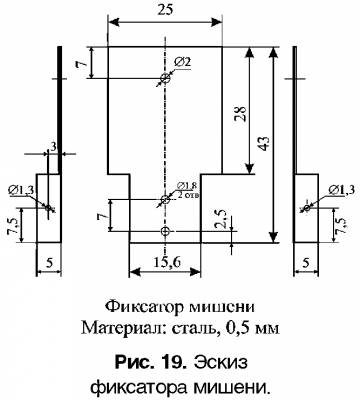
Мишень вставляется в разъем XS1 и
закрепляется при помощи фиксатора и винта М2. Эскиз фиксатора приведен на
рис. 19. Сам фиксатор закрепляется на скобе узла при помощи двух винтов М1,2.
На фиксаторе при помощи двух винтов М1,8 закрепляется хомутик для крепления
кабеля.

Внешний вид узла
крепления мишени с установленным фиксатором приведен на рис. 20.
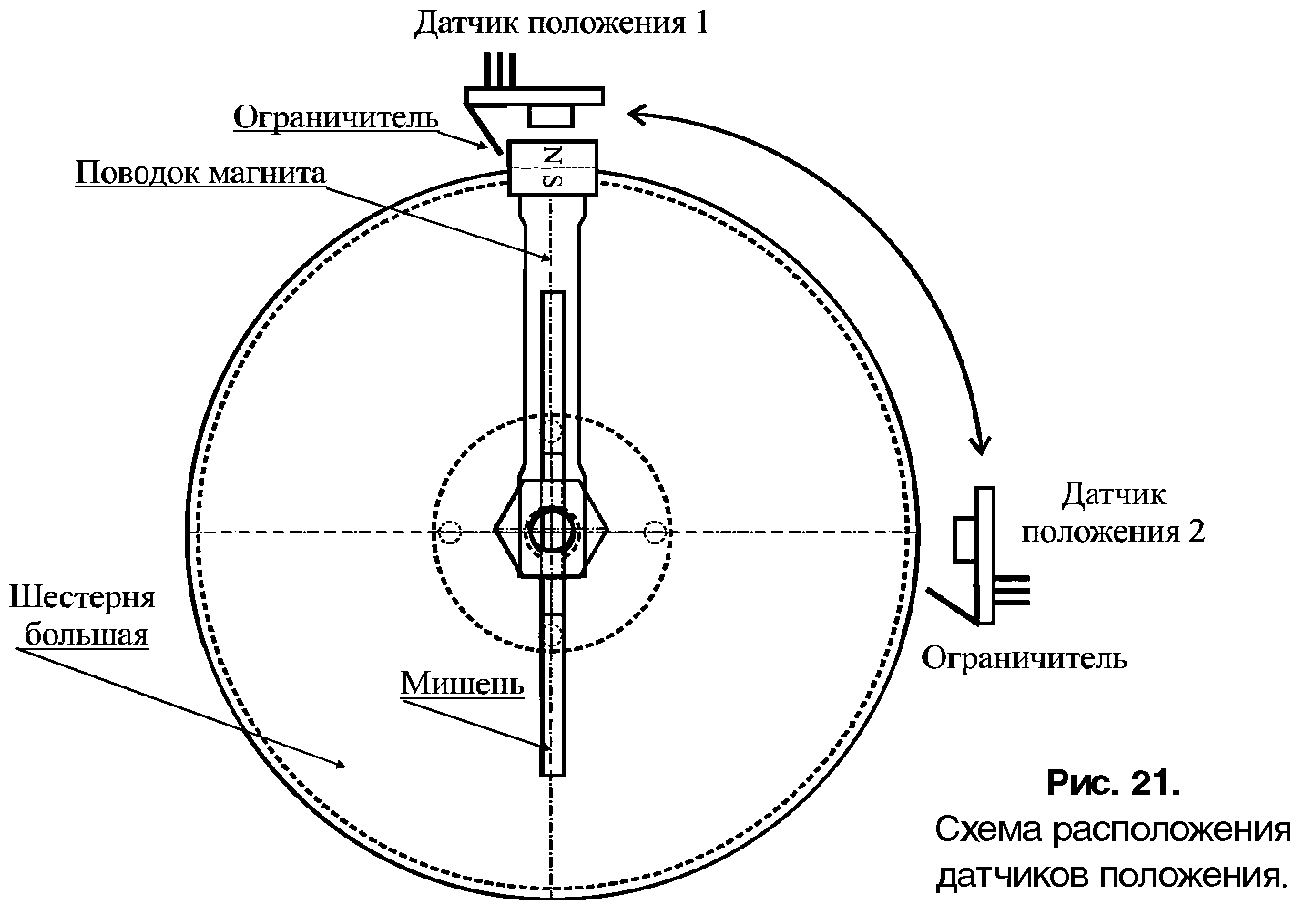
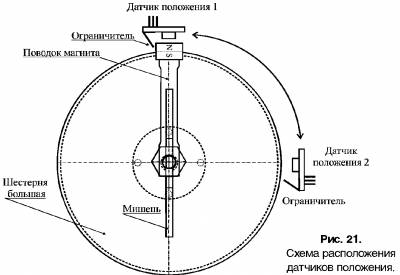
Для "программирования"
движения мишени используется схема управления механизмом поворота с датчиками положения. Датчики положения
расположены на расстоянии 90 градусов друг от друга. Схема расположения
датчиков положения приведена на рис. 21.
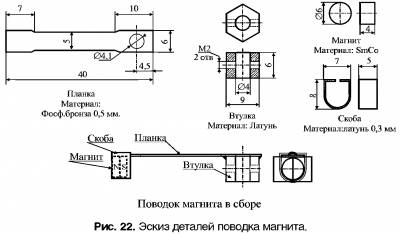
Управление
датчиками поворота осуществляется при помощи постоянного магнита,
установленного на поводке, и также укрепленного на общем валу механизма.
Эскиз деталей поводка магнита приведен на рис. 22.
Датчики положения
При изготовлении
устройства поворота мишени возникли значительные трудности определения
положения мишени. Использование контактных датчиков типа стандартных концевых
выключателей или контактных групп различных реле показали невозможность
применения подобных устройств, особенно при использовании маломощных
электродвигателей.
Наиболее
оптимальным в такой ситуации оказалось использование магнитных датчиков
положения, реализованных с применением магнитоуправляемых микросхем (МУМ). В
качестве активных элементов датчиков используются оте- чественные микросхемы
типа К1116КП9 или К1116КП10, что не исключает возможности применения иных типов
униполярных МУМ с приемлемыми параметрами [3, 4].
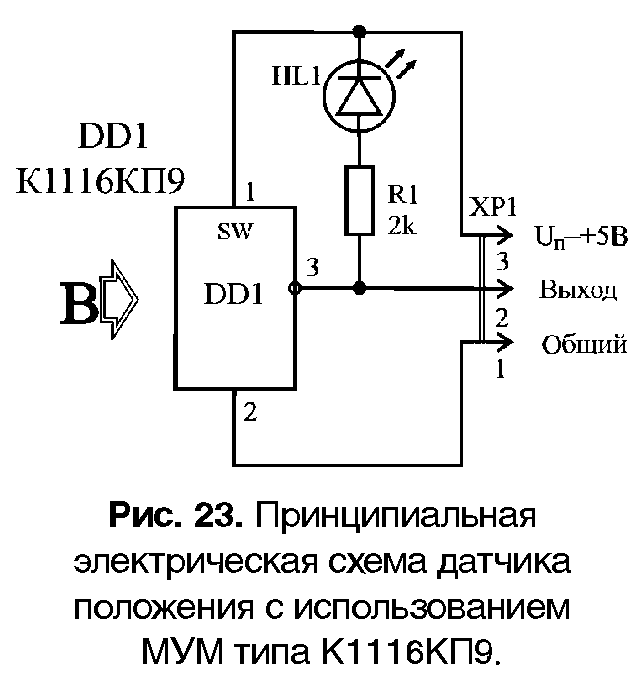
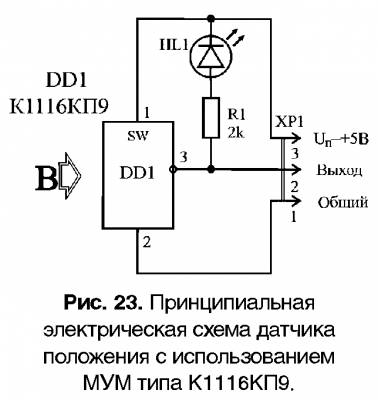
Принципиальная электрическая схема датчика положения с использованием МУМ
приведена на рис. 23.
Принцип работы
датчика положения предельно прост. При воздействии на чувствительный элемент
МУМ магнитного поля постоянного магнита (с индукцией более Вср) на
выходе микросхемы появляется сигнал, что, в свою очередь, приводит к зажиганию
светодиода HL1.
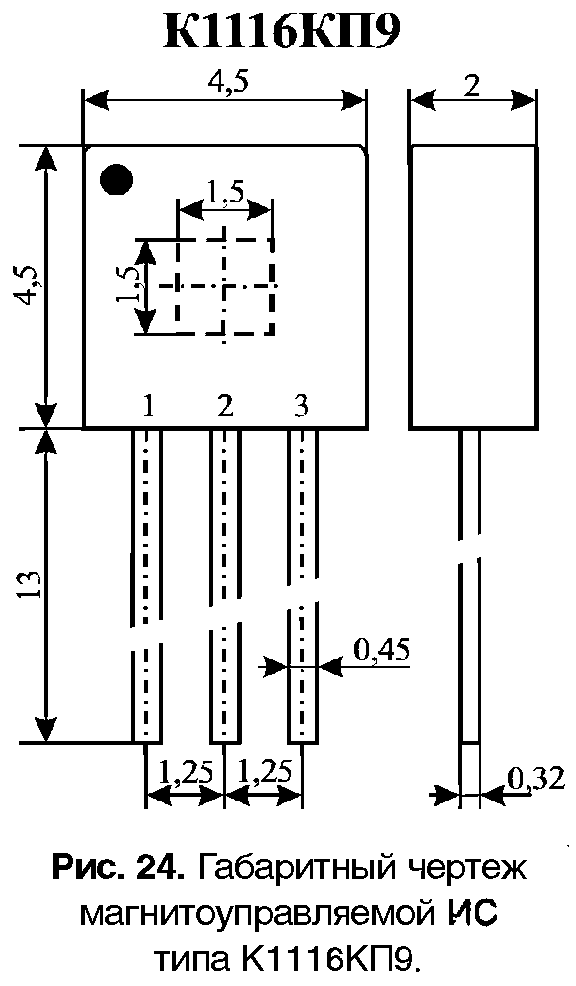
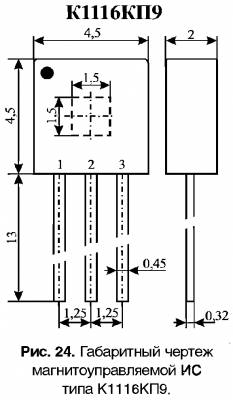
Основные параметры
МУМ типа К1116КП9 и К1116КП10 приведены в таблице 2, а габаритный чертеж - на
рис. 24.
Все элементы схемы
(рис. 23) размещены на печатной плате типа "слепыш". Габаритные
размеры платы 12,6x22x1,5 мм. На лицевой стороне платы размещена магни-
тоуправляемая схема (DA1) типа
К1116КП9, а на обратной - бескорпусной
светодиод (HL1) типоразмера 1206, бескорпусной резистор (R1) и 3-х контактный разъем
(ХР1) типа LPS-R. Внешний
вид магнитного датчика положения приведен на рис. 25.
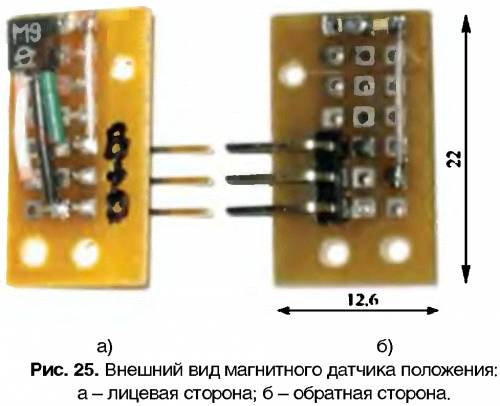
На плате
расположено три отверстия 02 мм. Два нижних отверстия предназначены для
крепления датчика, верхнее отверстие служит для крепления ограничителя движения
поводка магнита.
Комплект датчиков
состоит их двух единиц: левого и правого, которые отличаются местом расположения
разъема ХР1.
В комплекте с
датчиками используется постоянный магнит, изготовленный из сплава
"самарий- кобальт". Габаритные размеры магнита - 06 мм, высота 4 мм.
Индукция магнита - порядка 100 мТл. Расстояние срабатывания датчика составляет
от 3 до 5 мм.
Ток потребления магнитных
датчиков положения составляет, не более, 10 мА при напряжении питания 5 В.
Схема управления механизмом поворота
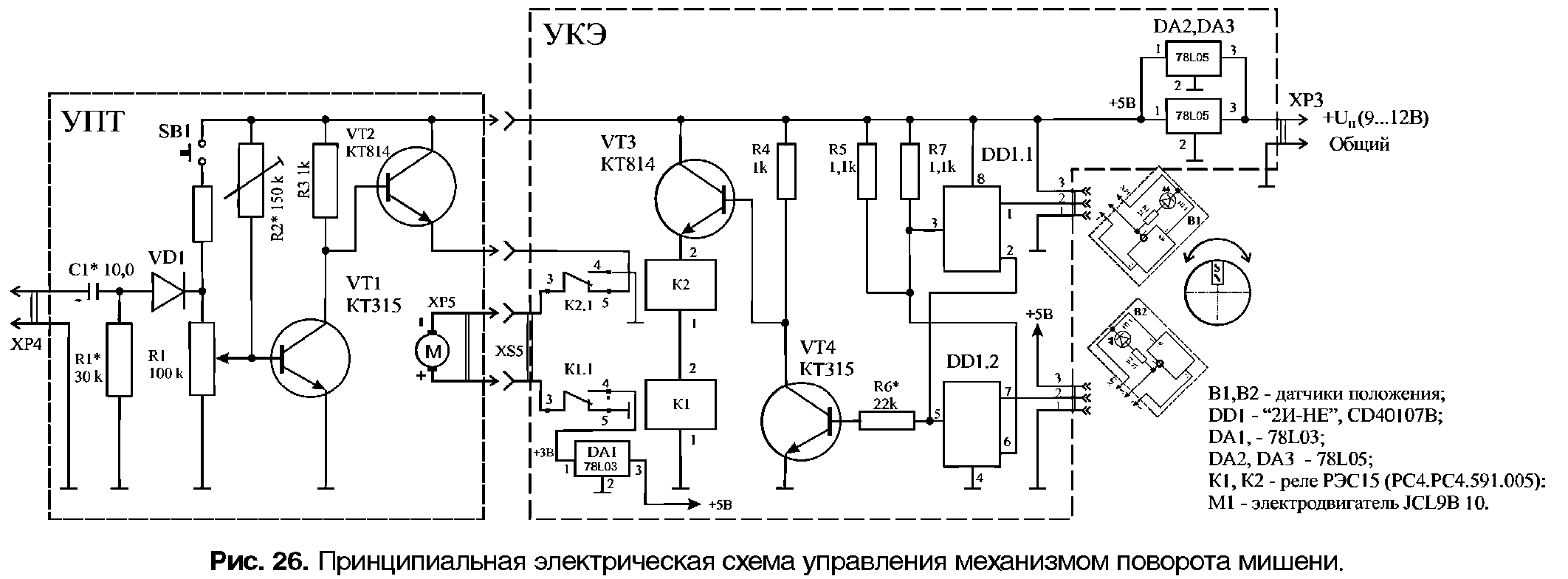
Принципиальная
электрическая схема управления механизмом поворота приведена на рис. 26.
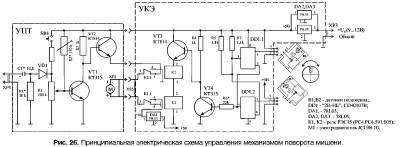
Принципиальная
электрическая схема механизма поворота мишени состоит из двух узлов: усилителя
постоянного тока (УПТ), реализованного на транзисторах VT1 и VT2, и
узла коммутации электродвигателя (УКЭ), реализованного на транзисторах VT3 и VT4 и
микросхеме DD1. Элементы DD1.1 и DD1.2
представляют собой триггер с двумя устойчивыми состояниями. К входам (1 и 7)
триггера подключены датчики положении (В1 и В2).
Кнопочный
выключатель SB1 служит для проверки
работоспособности схемы. Микросхемы DA2 и DA3 - стабилизаторы напряжения 5 В, DA1 - стабилизатор напряжения 3 В.
Механизм поворота
мишени функционирует следующим образом.
В исходном
состоянии мишень повернута лицом к "стрелку". Магнит находится в
верхнем положении напротив датчика В1 (см. рис. 21). Реле К1 и К2 обесточены,
электродвигатель (М1) через контакты реле 3-5 подключен к эмиттеру транзистора
VT2. При засветке фотодиода FD1 (см. рис. 2) на контакте 6 разъема ХР1 появляется
сигнал, который через коммутационную плату поступает на вход
(ХР4) усилителя постоянного тока (рис. 26). В
цепи эмиттера транзистора VT1 возникает
ток, приводящий в движение мотор М1. Время включения транзистора определяется
параметрами дифференцирующей цепочки R1, С1.
Величина напряжения на контактах электродвигателя (ХР5) устанавливается при
помощи подстроечного резистора R2 и не
должна превышать 3 В.
Вращение
электродвигателя приводит к повороту мишени и поводка магнита (см. рис. 21).
Магнит перемещается к датчику В2, в результате чего триггер (DD1) переходит
в противоположное состояние. На выводе 5 микросхемы DD1.2.
появляется сигнал, приводящий к включению реле К1, К2.
Мотор М1 через контакты реле 3-4 подключается к источнику DA1 и начинает вращаться в обратную сторону.
Магнит
устанавливается напротив датчика В1, триггер и мишень возвращаются в исходное
состояние до следующего попадания.
Детали и элементы
механизма поворота мишени. В механизме поворота использован маломощный 3-х
вольтовый электродвигатель типа JCL9B 10 фирмы Yamaha (024x12,6 мм). Непосредственно на валу электродвигателя укреплена
малая капроновая шестерня 07 мм, а на общем валу большая капроновая шестерня
068 мм.
Транзисторы VT1 и VT3 -
типа КТ315, транзисторы VT2 и VT4 - типа КТ814. Микросхема DD1 ("2И-НЕ"
с открытым выходом) - типа CD40107В.
В схеме
использованы два реле типа РЭС15 (паспорт РС4.591.005), включенные
последовательно (за неимением в распоряжении автора иных).
В качестве
кнопочного выключателя SB1 использована тактовая
кнопка типа TS-A1PS-130.
Микросхемы стабилизаторов напряжения DA2 и DA3 -
типа 78L05, a DA1 -
типа 78L03.
Элементы
принципиальной схемы механизма поворота (рис. 26) размещены на двух печатных
платах с габаритными размерами 26x50x1,5 мм и 30x35x1,5 мм. На первой плате
установлены элементы УПТ, а на второй - УКЭ. Внешний вид плат механизма
поворота мишени приведен на рис. 27.

На платах также
установлены разъемы для подключения источников питания и электродвигателя и
необходимых соединений (на схеме рис. 26 не показаны).
( ОКОНЧАНИЕ СЛЕДУЕТ )

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!