Теперь можно использовать протезную часть тела для выполнения вашей повседневной работы на свежем воздухе while оставайтесь в безопасности дома.
Что if у вас была лишняя пара рук для выполнения задач где-то else while вы управляли ими из другого места. Кажется нереальным, правда? Ну нет.
В этом проекте мы научимся создавать протез руки, который сможет имитировать естественные движения руки и сокращения мышц. Несмотря на то, что он искусственный, он работает аналогично биологической руке, следуя мышечным сигналам. Чтобы добиться этого, мы попытаемся зафиксировать сокращение мышц и величину напряжения, а затем использовать эти мышечные сигналы для беспроводного управления протезом руки, расположенным где-то else. Прикрепив протез руки и управляя им с помощью мышечных движений, это устройство может принести большую пользу людям с ограниченными физическими возможностями.
Компоненты для протеза руки с беспроводным ЭМГ-управлением
Сборка протеза руки
На рынке доступны различные протезы частей тела с открытым исходным кодом. Вы также можете распечатать их на 3D-принтере дома. Здесь я использую роботизированную руку InMoov. Получив необходимые детали, состоящие из пальцев и сервопривода, соберите протез руки, как показано на рисунках ниже.
Кодирование
Здесь нам нужно сделать два устройства: протез руки-передатчика данных и приемник с сервомеханизмом перемещения. Для каждого из них мы создадим два отдельных кода.
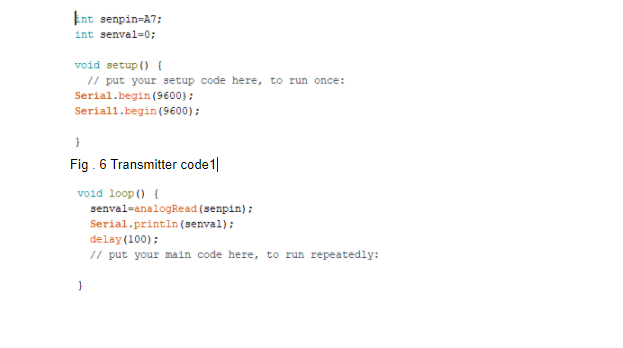
Код передатчика
Это необходимо для передачи данных ЭМГ на протез руки.
Прежде всего, нам необходимо определить номера контактов для датчика и переменные для хранения данных датчика ЭМГ. Затем создайте функцию настройки, в которой будет установлена скорость передачи данных для Bluetooth и последовательного порта. Arduino
Pro Micro предлагает два аппаратных последовательных порта: один для USB, а другой для контактов RX и TX. Используйте последовательный порт 1 для связи Bluetooth, установив скорость передачи данных на 9600 бод (что соответствует default для Bluetooth HC-05).
Затем создайте функцию цикла для отправки обновленных значений датчика ЭМГ в Bluetooth через регулярные промежутки времени.
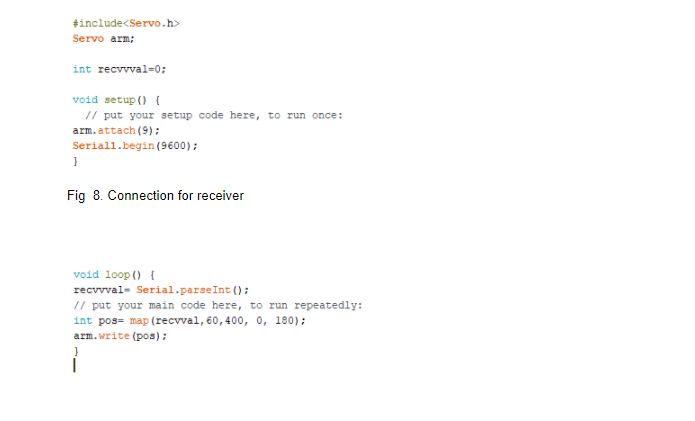
Код приемника и протеза руки
Для приемника включите сервобиблиотеку servo.h в код для управления им. Затем создайте функцию настройки, чтобы установить номер контакта для подключения сигнального провода PWM сервопривода для управления им.
Поскольку Arduino Pro Micro имеет несколько контактов PWM, мы будем использовать контакт номер 9 для управления сервоприводом PWM. Затем запустите последовательный порт, чтобы прочитать значение устройства-передатчика, а затем создайте функцию цикла, чтобы получить значение датчика ЭМГ через последовательный порт. Примените значение ЭМГ к диапазону вращения сервопривода в градусах, который составляет от 0 до 180 градусов для сервопривода и имеет значения от 60 до 800 для датчика ЭМГ.
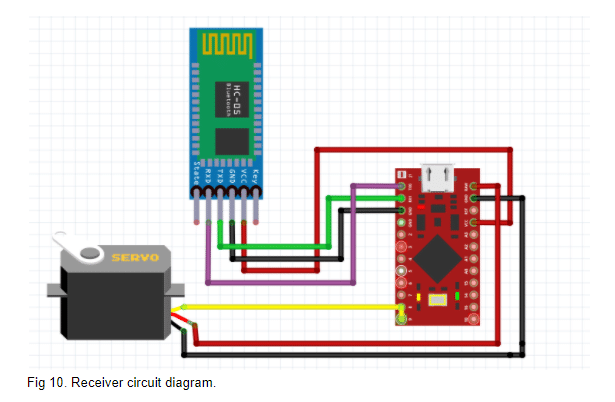
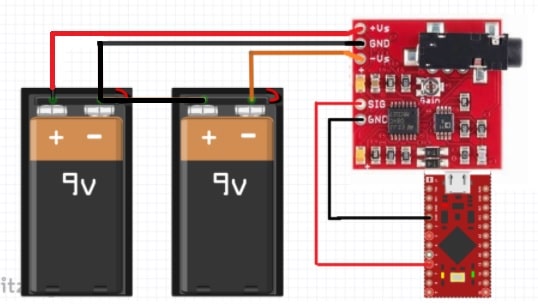
Соединение
Подключите компоненты передатчика и приемника, как показано на принципиальной схеме. Для схемы передатчика ЭМГ необходимо также добавить модуль Bluetooth в схему приемника.
Примечание. Вам необходимо настроить оба модуля Bluetooth для их сопряжения друг с другом и соответственно передачи/получения данных. Для этого вы можете следовать инструкциям, приведенным в проекте «Беспроводная мышь».
Затем запишите сопоставленное значение в положение перемещения сервопривода, чтобы переместить палец протезной руки в соответствии с сигналами, генерируемыми движением мышц.
Тестирование
Теперь прикрепите все пальцы к сервошкиву протезной руки и подайте питание на оба устройства, то есть передатчик и приемник, включая контроллер протезной руки. Затем наденьте электроды, как показано на рис. 12. Протезная рука будет имитировать движения пальцев всякий раз, когда вы закрываете и открываете ладонь.
Поздравляем!! Вы только что разработали для себя дополнительную руку, которой можно управлять по беспроводной сети.
Загрузить исходный код для протеза руки, управляемого с помощью ЭМГ
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!! Теперь можно использовать протезную часть тела для выполнения вашей повседневной работы на свежем воздухе while оставайтесь в безопасности дома.
Теперь можно использовать протезную часть тела для выполнения вашей повседневной работы на свежем воздухе while оставайтесь в безопасности дома.