Пожарный робот своими руками | Код и схема доступны
Пожарный робот своими руками | Код и схема доступны
Огонь всегда был важен для человеческого прогресса, однако, если не справиться с ним, он может быть вредным if. Пока пожарные борются с сильным пламенем, раннее вмешательство в домашних условиях часто позволяет избежать серьезных происшествий. В этом проекте описывается создание прототипа робота-пожаротушения, предназначенного для борьбы с бытовыми пожарами на ранних стадиях.
Рис. 1: Робот-пожаротушитель (авторский прототип)
Пожарный робот – схема и работа
Данный робот-пожаротушитель является прототипом (рис. 1) настоящего. Используемые здесь датчики представляют собой простые инфракрасные (ИК) фотодиоды, которые обнаруживают ИК-лучи, исходящие от огня. Сенсорная плата, установленная на верхней части шасси робота, имеет круглую форму, что обеспечивает роботу круговой обзор обнаружения на 360°.
Датчики расположены на одинаковом расстоянии друг от друга, под углом 45° каждый. Они действуют как глаза робота.
В реальном роботе рекомендуется использовать датчики пожара или ИК-камеры. Но они слишком дороги, поэтому в качестве замены в прототипе были использованы ИК-фотодиоды.
Использованный здесь насос символизирует механизм пожаротушения и используется в прототипе вместо него.
Кроме того, используемый корпус не является пожаробезопасным. В настоящем роботе должен использоваться огнестойкий материал for, обеспечивающий более эффективное функционирование for и эффективные результаты.
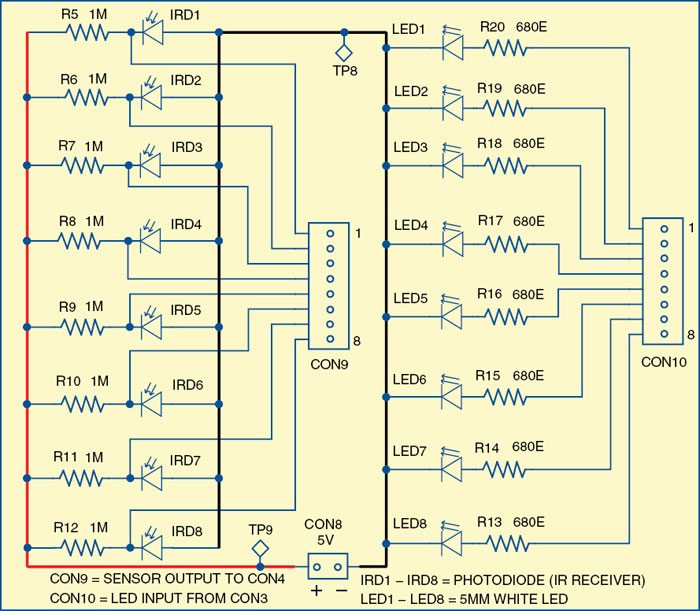
Рис. 2: Принципиальная схема сенсорного модуля
ИК-волны:
Длины волн длиннее видимой и до 1 мм называются ИК-волнами. ИК-излучение можно ощутить как тепловое излучение, например, for, когда вы стоите перед огнем.
Свет, излучаемый источником горения, состоит из ИК-волн, поэтому, используя ИК-фотодиоды в качестве датчиков, мы можем обнаружить пожар. Этот принцип был использован при разработке сенсорной платы.
Водяной насос постоянного тока:
При тушении пожаров используется водяной насос постоянного тока for. Он откачивает воду, хранящуюся в бутылке. Также можно использовать любой другой подходящий водяной насос.
РЧ-модуль:
Используется пара радиочастотных модулей передатчика-приемника 433 МГц. Он позволяет передавать и принимать последовательные данные без физического соединения. Частота радиочастотного сигнала обратно пропорциональна длине волны поля.
Робот может работать как в ручном, так и в автономном режиме. (Ручной режим был протестирован в лаборатории EFY.) Различные режимы работы приведены в Таблице I.
Робот-пожаротушитель работает в три этапа
Этап 1: обнаружение пожара (автономный режим)
ИК-фотодиоды подключаются по обратному смещению, как показано на принципиальной схеме сенсорного модуля (рис. 3). Аноды обычно подключаются к земле, а катоды - к 5 В через резисторы сопротивлением 1 МОм каждый.
Напряжение на фотодиоде подается на вход ADC контактов (от PA0 до PA7) ATmega16.
Когда ИК-волны падают на ИК-фотодиод, его сопротивление уменьшается с 650 кОм до 150 кОм, уменьшая напряжение на фотодиоде и тем самым изменяя входное напряжение на выводе ADC.
При правильном квантовании можно различить наличие и отсутствие пламени.
Аналогично, восемь ИК-фотодиодов, установленных по кругу на плате датчиков, помогают обнаружить возгорание; соответствующий LED светится if обнаружен пожар.
Конус обнаружения ИК-фотодиода большой, что снижает разрешающую способность системы. Эту проблему можно решить, правильно экранировав ИК-фотодиоды.
Код обнаружения пожара с помощью ADC выглядит следующим образом:
{ unsigned char v; v= read_adc(0); if(v>=0 && v <=128) //Сохраняет цифровое значение аналогового напряжения в ADC 0 fire_detected ( ); if(v>128 && v<=255) fire_not_detected();
Этап 2. Тушение пожара
Постоянная обратная связь от датчиков подается на основной модуль через CON4, а значит, определяется положение огня относительно робота.
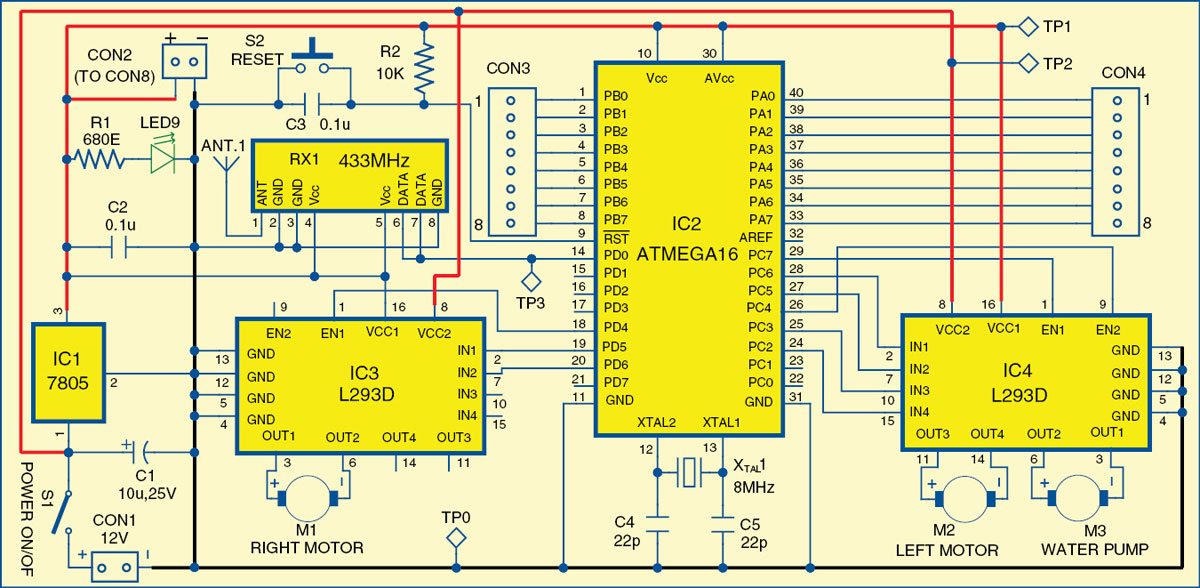
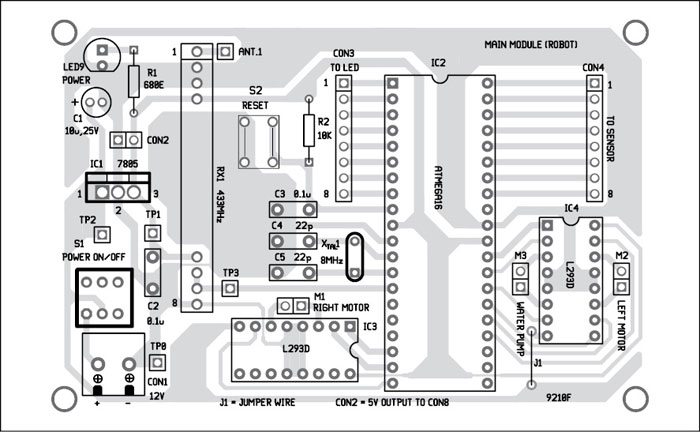
Основной модуль включает в себя микроконтроллер ATmega16, две микросхемы драйвера двигателя L293D для управления двигателями, водяной насос и радиочастотный приемник RX1. Принципиальная схема основного модуля представлена на рис. 3.
Рис. 3: Принципиальная схема основного модуля (робота)
Основная функция алгоритма — сориентировать передний датчик перед огнем так, чтобы сопло насоса находилось непосредственно над источником огня. Когда это достигается, насос запускается и тушит пожар.
Робот передвигается с помощью двух моторов, направление вращения которых контролируется контроллером в зависимости от обратной связи с датчика.
Этап 3. Радиочастотная связь и ручное управление (ручной режим)
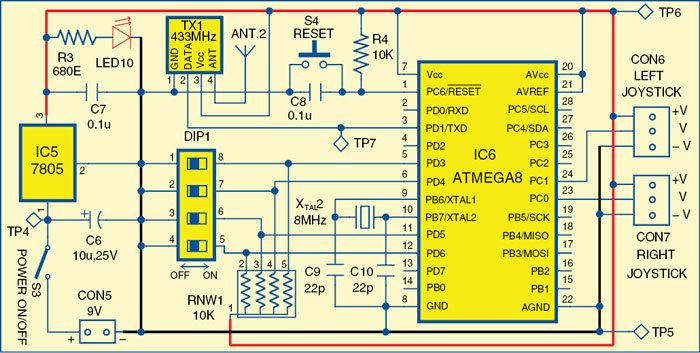
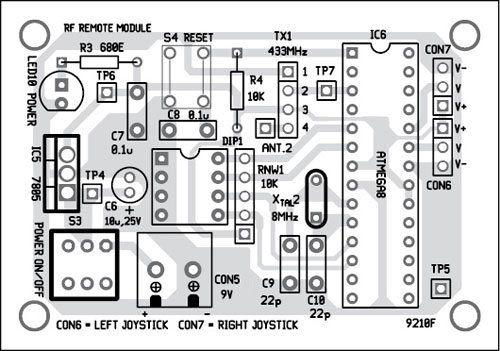
Робот управляется оператором с помощью беспроводного пульта (схема приведена на рис. 4), использующего радиочастотный модуль for, связывающийся с роботом.
Рис. 5. Выбор режима пожарного робота
Рис. 6. Точки тестирования пожарного робота
На пульте дистанционного управления расположены переключатели, кнопки и джойстики, которые управляют различными задачами, такими как выбор автономного режима, сброс и запуск насоса.
Для каждой команды пульт отправляет определенный символ, который принимает робот, и выполняется соответствующая операция.
Код образца for автономного режима приведен ниже:
Для удаленного управления (передатчика): if(check_bit(&PIND,4)==0) { i=’h’; //автоматический режим printf("%c",i); } Для робота (приемника): while(1) { scanf("%c",&ii); _delay_ms(10); switch(ii) { case ‘h’: //автоматический режим autonomous(); break;
Программное обеспечение и программирование робота-пожаротушения
Программирование AVR осуществляется с использованием встроенного языка C. Он похож на язык C, но включает в себя все функции C, а также доступ к контактам AVR, периферийным устройствам и элементам управления. Код C преобразуется в шестнадцатеричный код с помощью WinAVR.
Сгенерированные шестнадцатеричные коды записываются в микроконтроллеры for основного модуля (робота) и удаленного модуля. Работа программы поясняется в виде комментариев в исходных кодах основного модуля (робота) и удаленного модуля.
Программа переходит к основной функции, где начинается объектный код. К удаленному модулю подключен DIP (DIP1) switch, с помощью которого можно выбрать режим работы (автономный или ручной), switch отключить водяной насос, сбросить все настройки или LED режим проверки индикаторов, как указано в Таблице I.
WinAVR
WinAVR — это набор исполняемых инструментов разработки программного обеспечения с открытым исходным кодом for серии Atmel AVR. Он включает в себя компиляторы GNU GCC for C и C++, Блокнот программиста, Makefile и т. д.
Блокнот программиста (PN)
Это редактор исходного кода с некоторыми функциями IDE. PN может вызвать любой инструмент командной строки и записать его выходные данные. Идеально for вызвать утилиту make, которая выполняет файл make, который, в свою очередь, вызывает компилятор, компоновщик и другие утилиты, используемые для сборки вашего программного обеспечения.
Makefile
WinAVR теперь включает в себя утилиту MFile, автоматический генератор файлов for AVR GCC, который может работать на различных платформах, включая Windows, FreeBSD и Linux. Вы можете использовать эту утилиту для быстрого создания файлов make for вашего проекта на основе простого ввода в меню.
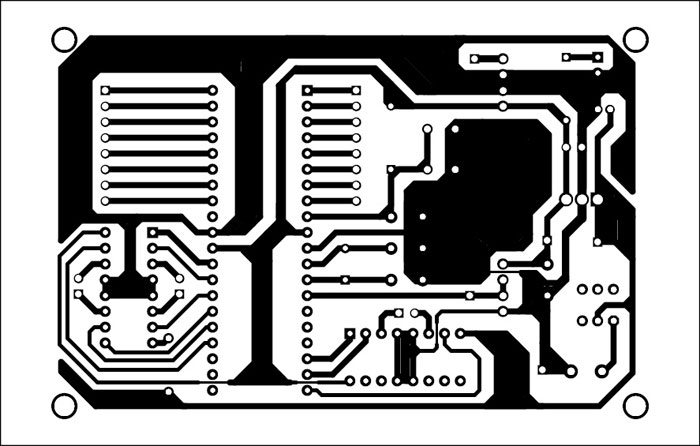
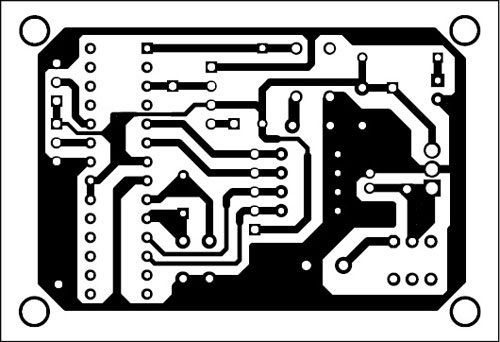
Односторонний PCB основного модуля показан на рис. 7, а расположение его компонентов — на рис. 8.
Односторонний PCB радиочастотного удаленного модуля показан на рис. 9, а расположение его компонентов — на рис. 10.
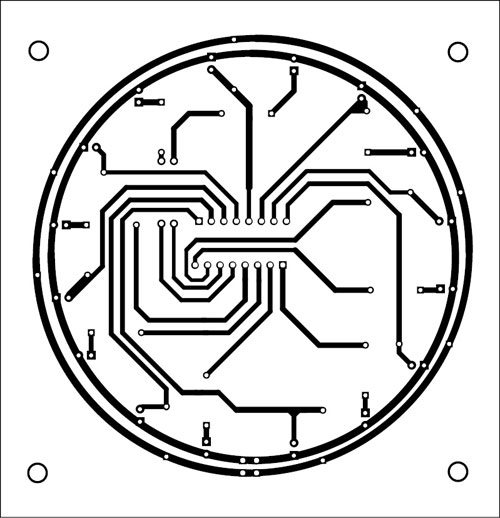
Односторонний PCB сенсорного модуля показан на рис. 11, а расположение его компонентов — на рис. 12.
Рис. 7: PCB основного модуля (робота)
Рис. 8: Компоновка компонентов PCB основного модуля (робота)
Рис. 9: PCB удаленного радиочастотного модуля
Рис. 10: Расположение компонентов PCB радиочастотного удаленного модуля
Рис. 11: PCB сенсорного модуля
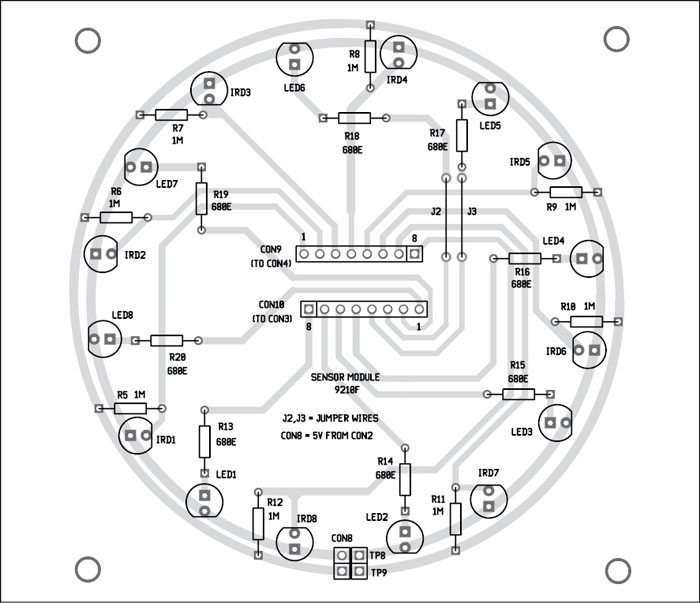
Рис. 12: Расположение компонентов PCB сенсорного модуля
Загрузите PCB и PDF-файлы компоновки компонентов: Нажмите здесь
Также можно собрать схему на универсальном PCB. Перед установкой микроконтроллеров на печатные платы запишите соответствующие коды в микроконтроллеры с помощью подходящей платы программатора.
Тестирование пожарного робота
После установки всех компонентов на печатные платы, switch на источниках питания соответствующих блоков.
У основного модуля (робота) изначально на четных выводах PORTB IC2 светятся четыре индикатора LED от default, и робот for ожидает сигнала от радиочастотного пульта. Вы также можете проверить все светодиоды, переведя порт PD6 микросхемы IC6 на низкий уровень через DIP1 switch.
Для ручного режима к каналам ADC контроллера (PC0 и PC1) на удаленном модуле подключены два джойстика. С помощью джойстика можно управлять движениями робота.
Переместите робота к источнику огня. Переведите PD5 микросхемы IC6 в низкое положение через DIP1 от switch до switch на водяном насосе.
Для устранения неполадок в цепи убедитесь, что напряжения в различных контрольных точках соответствуют Таблице II.
Приложения
<р>1. Заменив ИК-фотодатчики на тепловизионную камеру, насос на механизм пожаротушения и сделав корпус робота пожаробезопасным, его можно использовать for в противопожарных целях. Его также можно использовать для помощи пожарным, помогая им добраться до труднодоступных мест и спасти больше жизней.
<р>2. Увеличение количества датчиков еще больше улучшит разрешение и точность системы.
<р>3. В автономном режиме он может обнаружить возгорание, if любое, и потушить его без посторонней помощи.
<р>4. Радиочастотный модуль позволяет for оператору управлять роботом вручную на расстоянии, обеспечивая тем самым возможность наблюдения.
Ограничения
ИК-фотодиоды также реагируют на солнечные лучи, как и на огонь, поскольку они тоже содержат ИК-волны, что позволяет роботу делать ложные суждения.
Однако влияние солнечного света и других факторов незначительно. if мы используем более качественные датчики (которые гораздо дороже).
Возможные обновления for Расширенная функциональность
Усовершенствованные датчики. Используйте датчики пламени for для более точного обнаружения.
Термостойкие материалы. Жаростойкие материалы повышают долговечность в условиях реального пожара.
Расширенная навигация. Используйте GPS или обнаружение препятствий, чтобы улучшить передвижение по труднопроходимой местности.
Управление аккумулятором. Добавьте индикацию заряда аккумулятора или автоматическую зарядку for при длительном использовании.
Этот робот-пожаротушитель представляет собой действующий прототип, демонстрирующий экономичный автоматизированный метод for, который эффективно справляется с небольшими пожарами в жилых домах. Его можно дополнительно настроить для обеспечения более сложных функций for промышленного или коммерческого использования.
Другие проекты противопожарной защиты
Амол Гулхане получил степень бакалавра технических наук (электроника и телекоммуникации) в Инженерном колледже Пуны и является соучредителем Robolab Technologies.
Эта статья была впервые опубликована 8 апреля 2017 года и недавно обновлена в 2025 году.
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!