Имитатор датчика положения коленчатого вала и программа распознавания его сигнала
Во многих моторах европейских (в т.ч. наших) автомобилей используется система управления двигателем на основе предложенного фирмой BOSCH датчика положения коленчатого вала, представляющего из себя диск с 60 зубьями, два из которых удалены для однозначного определения начала отсчёта. Эта система достаточно надёжна и обладает рядом преимуществ. Стоит отметить, что положению ВМТ (TDC) соответствует, как правило, начало 20 зубца до двойного пропуска(не на всех моторах). В этом случае двойной пропуск – начало отсчёта приходится на положение, где неравномерность вращения КВ минимальна. В системе управления двигателем это, на мой взгляд, тот сигнал, который сложнее всего сымитировать.
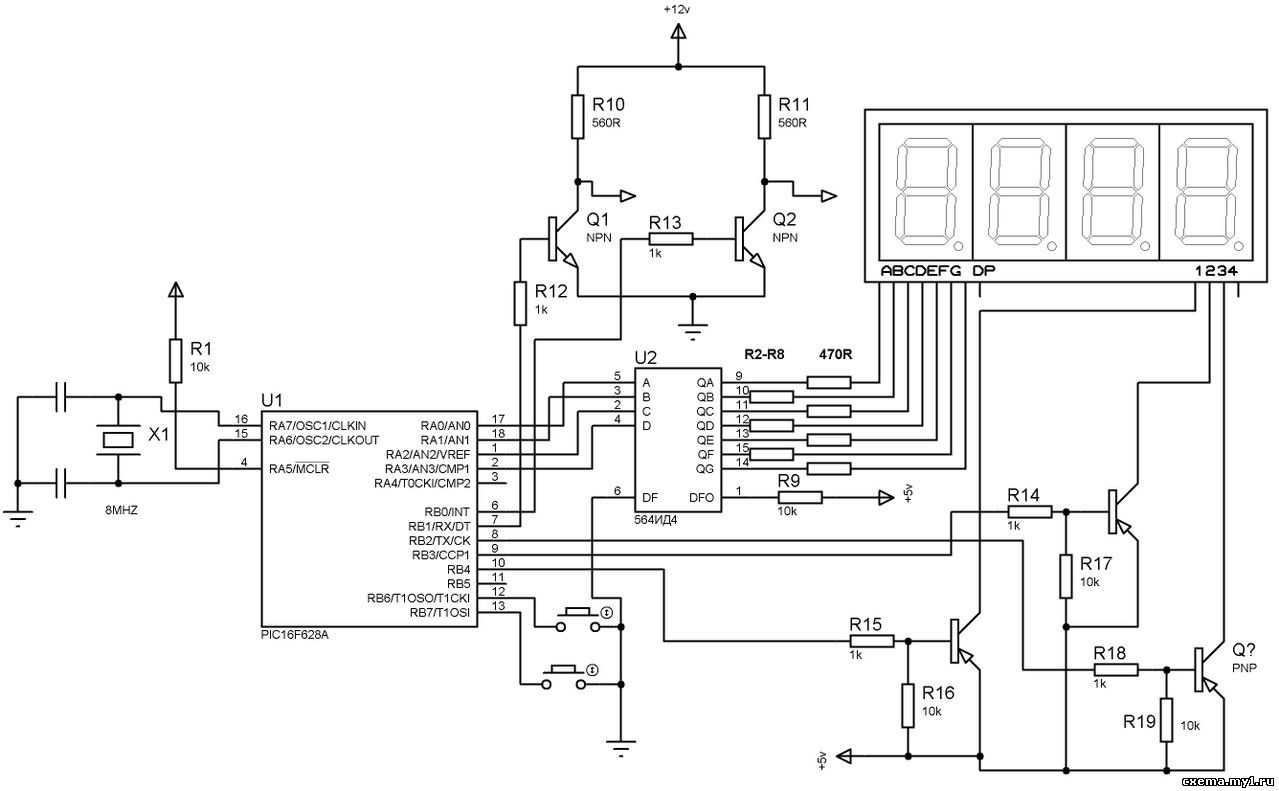
В интернете достаточно много схем устройств, предназначенной для этой цели, но мне понадобилось, как всегда, особенное. Изначально я хотел использовать его для снятия характеристик серийных блоков управления, поэтому необходимо было более-менее точное задание частоты вращения. Но это не препятствует использованию в проверочных целях.Для этого время каждого импульса задаётся заранее рассчитанной таблицей значений таймера и предделителя. Текущие обороты отображаются на четырёхразрядном индикаторе, четвёртый разряд которого скоммутирован так, чтобы на нём всегда горел 0.
Т.е. реально используются 3 разряда. Частота вращения регулируется кнопками плюс и минус с шагом в 50 об/мин. Выходной каскад представляет собой просто ключ и для половины мозгов этого достаточно, лишь для некоторых может потребоваться включение на выходе трансформатора (разделительный от старых приёмников вполне подойдёт).
Второй сигнал(PORTB,0) предназначен для формирования сигнала фазы распредвала, но автор пока этим не занимался.
Дешифратор можно использовать ещё 176ИД2, 176ИД3.
Индикаторы у меня использованы дискретные 4 шт, какие под рукой оказались (HDN1075D),но можно любые при соотв. коррекции схемы.
Теперь про дешифрацию его сигналов.
Чтобы не изобретать велосипед самому, я обратился к фирменному описанию работы бошевских мозгов. В упрощённом виде принцип распознавания выглядит так следующим образом.
Исходя из формы задающего диска обработчик ДПКВ может работать в 2-х режимах:
1. Поисковый - система управления производит поиск маркерного отрезка с отсутствующими 59 и 60 зубьями, в этом режиме невозможно формирование импульсов зажигания и впрыска.
2. Синхронизированный - когда системе управления точно известен номер зуба задающего диска, который вызвал текущее событие обработчика, в этом режиме могут формироваться импульсы зажигания и впрыска четко привязанные к номеру зуба и номеру цилиндра.
Поисковый режим.
Программа проверяет предположение, что текущий зуб является первым. Для чего проверяет интервал между двумя последними зубьями на минимум двукратное превышение интервала между двумя предпоследними зубьями. Как только это условие выполнится - программа переходит в синхронизированный режим. На всякий случай проверяется ещё условие, что период сигнала не превысил учетверённого значения предыдущего.
Работа имитатора отсутствующих зубьев.
Для возможности привязки событий в системе управления во всем диапазоне углов с точностью 6 градусов программа использует имитацию отсутствующих зубьев номер 59 и 60, таким образом для менеджмента событий ДПКВ восстанавливается целостность реперного диска и обеспечивается полная незаметность отсутствующих зубьев. При этом программа естественно предполагает равноускоренное движение реперного диска на интервале 57-58-59-60 зубьев, поскольку в реальности это движение может быть и не равноускоренным - положение прорези специально выбрано таким образом, чтоб зубья 59 и 60 не попадали в критическую зону управления двигателем по углу (например область формирования УОЗ +60 -10 ПКВ для каждого цилиндра соответственно.
В синхронизированном режиме при обработке события 58 зуба ДПКВ программа предполагает отсутствие 59-го зуба, поэтому она переключает модуль CCP из режима захвата в режим сравнения, после чего программа берет ранее захваченное состояние таймера на 58 зубе и добавляет к нему угловой интервал в между зубьями 57 и 58, таким образом предугадывая момент прохода над датчиком 59 зуба на основе предположения о равноускоренном вращении диска в этом угловом интервале. Когда модуль сравнения обнаружит очередное совпадение регистров таймера возникнет новый флаг события ДПКВ, который будет обработан как отсутствующий 59 зуб. Точно также будет установлен момент прохождения отсутствующего 60-го зуба, обработчик которого снова переводит модуль ССP в режим захвата, таким образом имитатор будет отключен и следующий вызов обработчика будет инициирован аппаратно 1-м зубом шестерни.
Здесь опущены алгоритмы определения скорости вращения, неравномерности и индикации ошибок. На начальном этапе это не так важно. Тем не менее, этот алгоритм, реализованный мной в программе, успешно распознаёт текущий номер зуба и позволяет привязать к нему какие-либо внешние события. Эту программу я использовал чтобы привязать к датчику коленвала «60-2» ECU мотора, имеющего другой вид ДПКВ. Работает весьма надёжно уже около полугода. (гибрид мотор БМВ, мозги Хонда). На этой основе возможно создать неплохую систему зажигания, в готовых алгоритм, скорее всего, аналогичный, но скрывается разработчиками. Или пойти далее и создать целиком систему впрыска. Процессор, конечно, понадобится более мощный. Подобных открытых проектов в мире уже несколько. Я не призываю к его немедленной реализации, однако мысли вроде «А почему бы и нет?» иногда проскакивают.
Короче говоря, файл заготовки программы - проверенный! – прилагаю: 60-2.ASM . Целиком, вместе с железом, выкладывать не вижу смысла, так как применение очень специфичное и вряд ли кому будет интересно. Упомянул его только для того, чтобы подтвердить реальную проверку реализации этого алгоритма.
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Download
Download Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!