Ультразвуковой дальномер с использованием Raspberry Pi 2 | Проект электроники
Ультразвуковой дальномер с использованием Raspberry Pi 2 | Проект электроники
Ультразвуковой модуль измерения дальности HC-SR04 обеспечивает диапазон бесконтактного измерения расстояния от 2 до 400 см. Его точность может достигать ±3 мм при периоде цикла 50 мс, что является минимальной рекомендуемой задержкой перед проведением измерений. Модуль включает в себя ультразвуковой передатчик, приемник и схему управления. В этом проекте используется модуль ультразвуковой дальнометрии с raspberry pi для создания ультразвукового дальномера.
Raspberry Pi 2 — это плата Raspberry Pi второго поколения, выпущенная в феврале 2015 года. Это компьютер на базе Linux с мощным четырехъядерным процессором Broadcom BCM2836 ARMv7 900 МГц и SDRAM объемом 1 ГБ. Он работает от напряжения 5 В постоянного тока при силе тока 200 мА и имеет 40 контактов GPIO, а также HDMI, слот для карты micro-SD, Ethernet, USB аудиовыходы 2.0 и 3.5.
Ультразвуковой дальномер – схема и работа
Для этого проекта необходимы компоненты Raspberry Pi (или Raspi) 2, модуль HC-SR04, резисторы 330 Ом и 470 Ом, а также несколько перемычек.
Работа ультразвукового датчика HC-SR04 довольно проста. Принципиальная схема Raspi с HC-SR04 показана на рис. 3. Модуль HC-SR04 и его работа показаны на рис. 1 и 2 соответственно.
Рис. 1: Модуль ультразвукового датчика HC-SR04Рис. 2: Работа HC-SR04Рис. 3: Подключение модуля HC-SR04 к Raspi
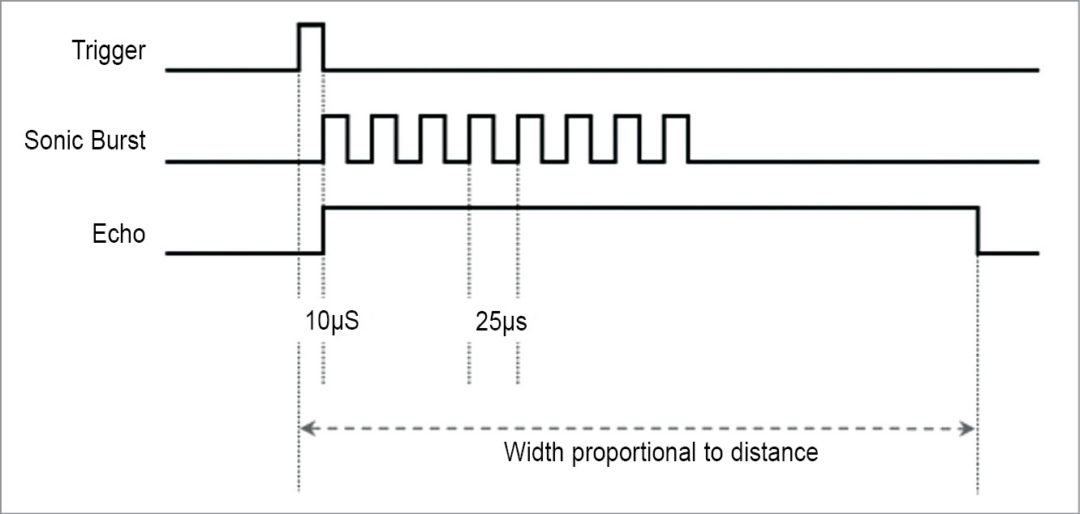
Когда процессор подает высокий сигнал на триггерный контакт датчика, датчик излучает восьмицикловые звуковые импульсы с частотой 40 кГц. После отправки звукового импульса датчик устанавливает высокий уровень эха до тех пор, пока звуковой импульс не вернется к датчику — после отражения от объекта. Следовательно, длина этого импульса пропорциональна тому, насколько далеко находится объект.
Теперь расстояние, пройденное импульсом, в два раза превышает расстояние, которое необходимо измерить, а скорость звука составляет примерно 340 метров в секунду. Расчеты можно провести с использованием следующего соотношения:
Скорость=Расстояние/Время или
340=(2×Расстояние)/Время или
Расстояние=170×Время
Таким образом, можно определить расстояние между объектом и датчиком в метрах. Чтобы выполнить расчет в сантиметрах, умножьте полученное значение на 100.
Подключите HC-SR04 к Raspi, как указано ниже (см. также рис. 3)
Резисторы R1 и R2 используются для балансировки выходного сигнала, поскольку высокий сигнал датчика составляет +5 В, тогда как Raspi работает на уровне +3,3 В.
Следовательно, делитель напряжения помогает снизить уровень выходного напряжения.
Программное обеспечение
Существует множество операционных систем, разработанных для Raspi 2, но наиболее широко используются Raspian (на базе Linux) и Microsoft Windows 10 IoT Core. Если вы новичок в Raspi 2, перейдите по ссылке: www.raspberrypi.org/help, чтобы получить информацию о Raspi.
В этом проекте используется компилятор Python, а операционная система для Raspi — Raspbian. Цель состоит в том, чтобы измерить расстояние между датчиком и объектом, который находится на неизвестном расстоянии от датчика.
Для взаимодействия с HC-SR04 необходимы некоторые пакеты. Чтобы загрузить эти пакеты, запустите Терминал на Raspi и выполните команды, приведенные ниже. Убедитесь, что ваш Raspi подключен к Интернету, иначе команды не будут работать.
После входа в систему обновите Raspi, используя команды, приведенные ниже. Это гарантирует, что у вас установлены новейшие версии программного обеспечения и драйверов.
Следующие команды познакомят вас с некоторыми распространенными инструментами Python:
pi@raspberrrypi ~$ sudo apt-get install python-dev
// Это должно установить инструменты разработки Python
pi@raspberrrypi~$sudo wget http://pypi.python.org/packages/source/R/RPi.GPIO/RPi.GPIO-0.6.1.tar.gz
// Загружаем пакет GPIO
pi@raspberrrypi ~$ sudo tar zxf Rpi.
GPIO-0.6.1.tar.gz
// Извлекает пакет
pi@raspberrrypi ~$ cd Rpi.GPIO-0.6.1
//Это должно изменить каталог на папку Rpi GPIO
pi@raspberrrypi ~$ sudo python setup.py install
// Это установит пакет GPIO на Raspi
Чтобы убедиться, что все в порядке, перезагрузите Raspi, введя следующую команду:
pi@raspberrrypi ~$ sudo перезагрузка
Теперь все пакеты, необходимые для взаимодействия HC-SR04 с Raspi, установлены.
Код Python
Запустите Raspi и создайте папку UltraTest. В этом руководстве используются библиотеки RPi.GPIO и time. Создайте новый файл (Ultra_Test.py) в редакторе nano, используя команды, приведенные ниже:
[stextbox id="grey"]pi@raspberrrypi ~ $ cd ~/Desktop/UltraTest
// Изменяем каталог на UltraTest
pi@raspberrrypi ~/Desktop/UltraTest
$ sudo nano Ultra_Test.py
// Пишем скрипт Python как Ultra_Test.py[/stextbox]
Нажмите Ctrl+O, чтобы сохранить скрипт Python, а затем нажмите Ctrl+X, чтобы выйти.
Создание и тестирование
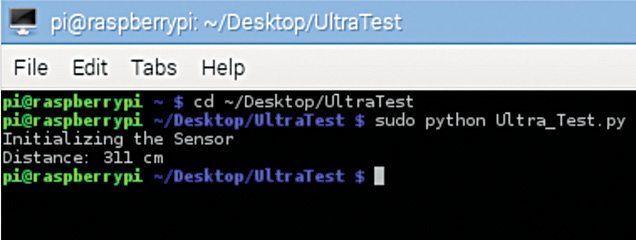
После сохранения кода и подключения HC-SR04 к Raspi загрузите Raspi. В терминале введите следующие команды для выполнения вашей программы. Папка назначения — UltraTest, имя файла — Ultra_Test.py, как показано на рис. 4.
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Файлы
Файлы Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!!