Линейный привод с позиционным управлением и уровнем Accuracy в мм.
Линейный привод с позиционным управлением и уровнем Accuracy в мм.
Линейные приводы широко используются в робототехнике и мехатронике. Но получить их точную позицию сложно. Линейные приводы очень дороги (цены начинаются от 10 тыс.) и могут достигать нескольких сантиметров, а линейный привод с позиционным управлением трудно найти.
Итак, я самостоятельно разработал линейный привод с позиционным управлением, разработав концепцию механизма, корпуса, кода и электронной схемы. Объединив их все, конечный продукт будет готов.
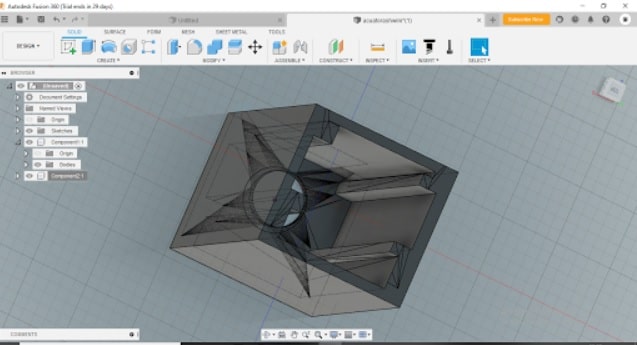
Сначала спроектируйте вал и поршень/шток привода для линейного привода с позиционным управлением. Поскольку необходимые механические детали уже созданы (с помощью Fusion 360), нет необходимости проектировать их заново. При желании вы можете выбрать любое другое программное обеспечение САПР, например DesignSpark или Tinkercad.
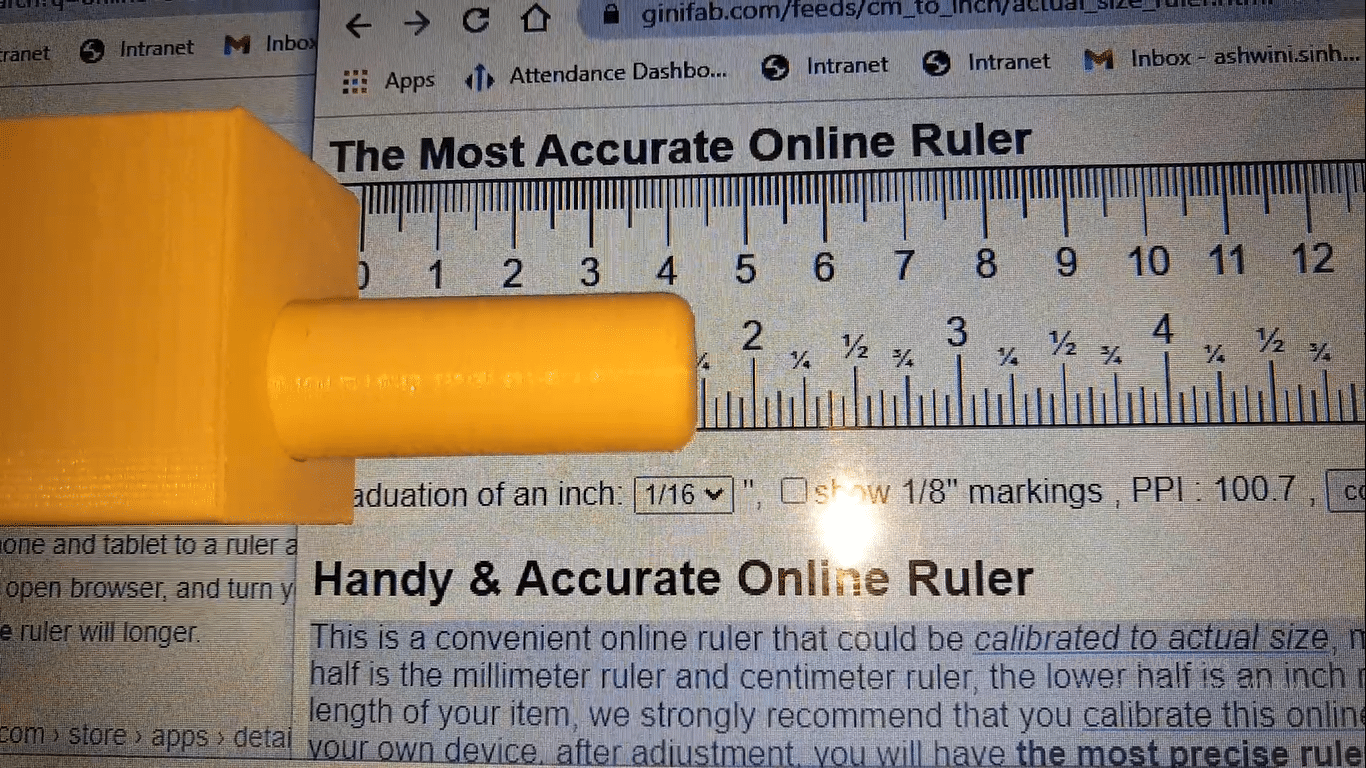
Для привода следует использовать ходовые винты длиной 15 см и шагом 2 мм. Измерьте ширину и высоту ходовых винтов и их гаек. Затем спроектируйте детали по размерам.
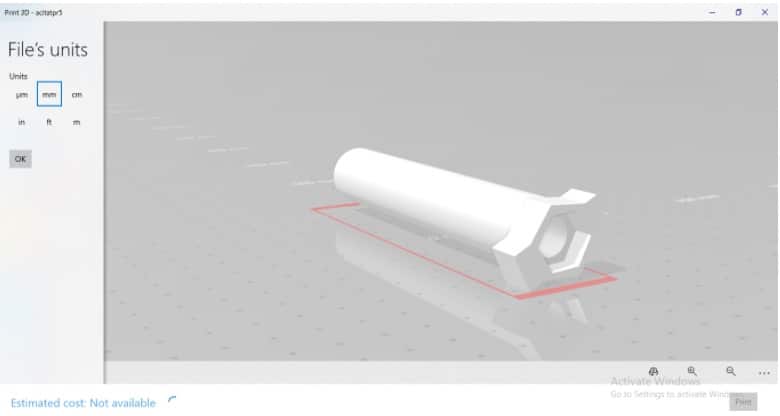
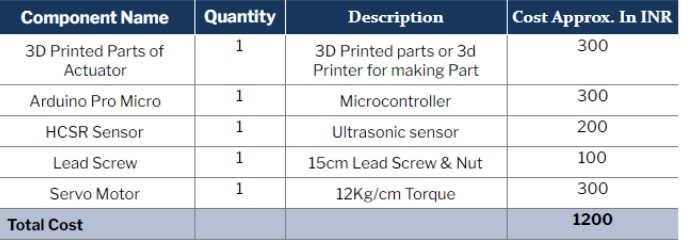
Если вы изучаете электронику/мехатронику/электромеханику или хотите изучить проектирование компонентов, вы можете просмотреть файлы проектов .stl и .f3d, прилагаемые к статье. В противном случае вы можете пропустить их и сразу получить напечатанные на 3D-принтере детали с теми же размерами ходового винта и гайки, что и другие детали, указанные в спецификации.
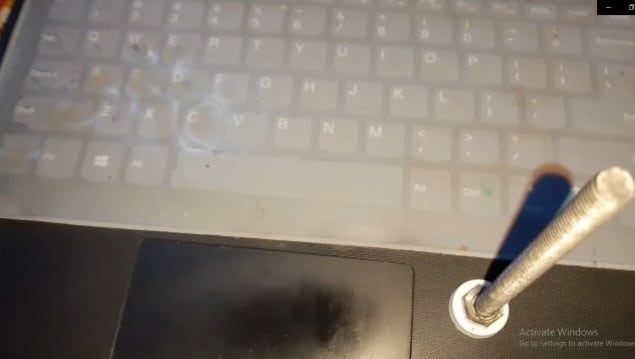
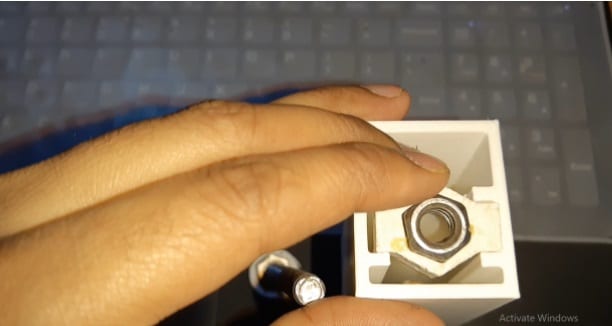
После получения всех напечатанных на 3D-принтере деталей и другой электроники давайте соберем привод.Сначала вставьте головку ходового винта в небольшой напечатанный на 3D-принтере соединитель вала (см. рис. 5). Во-вторых, наденьте болт на напечатанную на 3D-принтере движущуюся часть привода длиной 15 см (см. рис. 6). В-третьих, поместите ходовой винт внутрь приводной части, повернув его по часовой стрелке. Убедитесь, что он надежно зафиксирован внутри.Затем прикрепите подвижную часть привода к основной части корпуса, напечатанной на 3D-принтере (см. рис. 7).
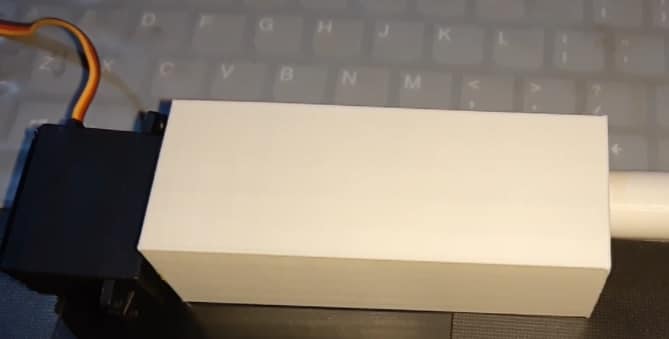
И наконец, прикрепите серводвигатель к валу линейного привода с помощью клея и винта. Затем закрепите сервопривод на основном корпусе привода с помощью винта и клея.
Рис. 9. Настройка сервопривода
Кодирование
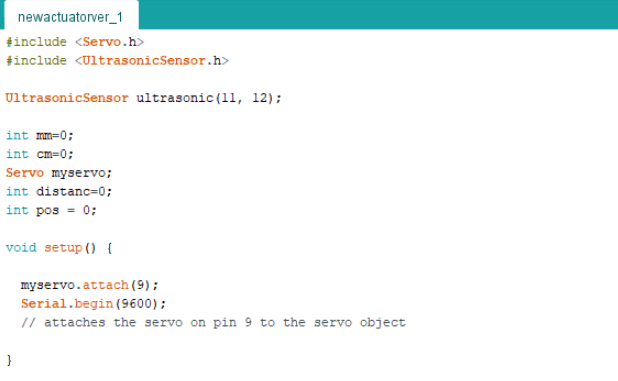
Начните с установки библиотеки ультразвуковых датчиков. Для этого откройте диспетчер библиотек, расположенный в разделе «Инструменты». Найдите библиотеку по названию и установите ее.
Для кода создайте переменную, которая будет хранить значение текущей позиции.
После этого определите контакт для датчика и создайте функцию настройки для установки скорости последовательной связи с Arduino. Это позволит ему получить текущее положение привода и впоследствии отправить команду на перемещение привода в желаемое положение.
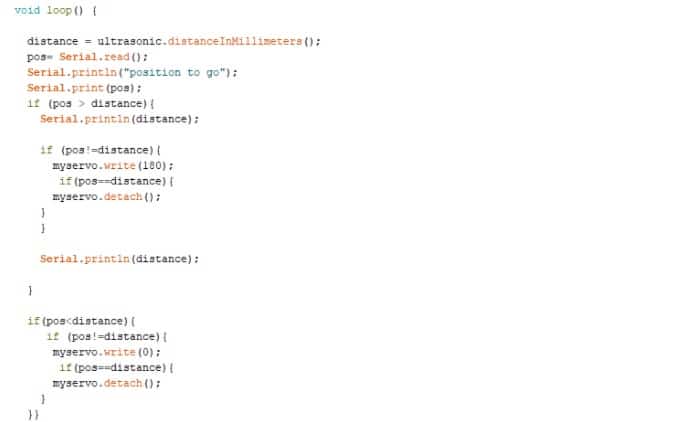
Далее создайте цикл, посредством которого текущее положение привода (в мм) можно будет регулярно получать от датчика. Также добавьте условие if() для проверки значений текущих и желаемых позиций. Если желаемое значение положения больше текущего значения положения, то сервопривод должен двигаться по часовой стрелке, пока привод не достигнет желаемого положения. Если if значение меньше, то сервопривод должен двигаться против часовой стрелки до тех пор, пока текущее положение привода не будет соответствовать желаемому положению.
Рис. 10. КодРис. 11. Код
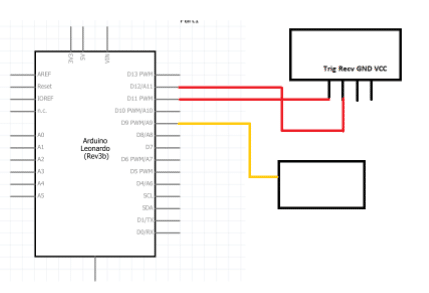
Соединение
Установите следующие подключения:
Сервопривод от аккумулятора 5–9 В
Сигнальный контакт (желтый) к контакту 9 Arduino
Датчик TRIG на контакте 11 Arduino
Вывод REC на 12-м разъеме Arduino
Подайте питание на датчик, используя контакт VCC Arduino. Соедините контакт GND на Arduino с контактом GND датчика.
Рис. 12. Подключение
Тестирование
После подключения аккумулятора и сервопривода подключите Arduino к ПК. Откройте последовательный монитор и введите значение расстояния (в мм), на которое должен переместиться привод.
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Файлы
Файлы Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!! Линейные приводы широко используются в робототехнике и мехатронике. Но получить их точную позицию сложно. Линейные приводы очень дороги (цены начинаются от 10 тыс.) и могут достигать нескольких сантиметров, а линейный привод с позиционным управлением трудно найти.
Линейные приводы широко используются в робототехнике и мехатронике. Но получить их точную позицию сложно. Линейные приводы очень дороги (цены начинаются от 10 тыс.) и могут достигать нескольких сантиметров, а линейный привод с позиционным управлением трудно найти.