Автомобиль-робот на базе Arduino, управляемый смартфоном | Полный проект
Автомобиль-робот на базе Arduino, управляемый смартфоном | Полный проект
В настоящее время смартфоны можно использовать для управления множество электрических и электронных устройств, включая двигатели, музыкальные системы и освещение. Здесь мы представляем автомобиль-робот на базе Arduino, которым можно управлять с помощью Android-смартфона с установленным на нем приложением ArduinoRC. Этот бот получает команды с вашего смартфона с помощью модуля Bluetooth. Авторский прототип показан на рис. 1.
Рис. 1: Авторский прототип автомобиля-робота на базе Arduino
Схема автомобиля-робота на базе Arduino и работающая
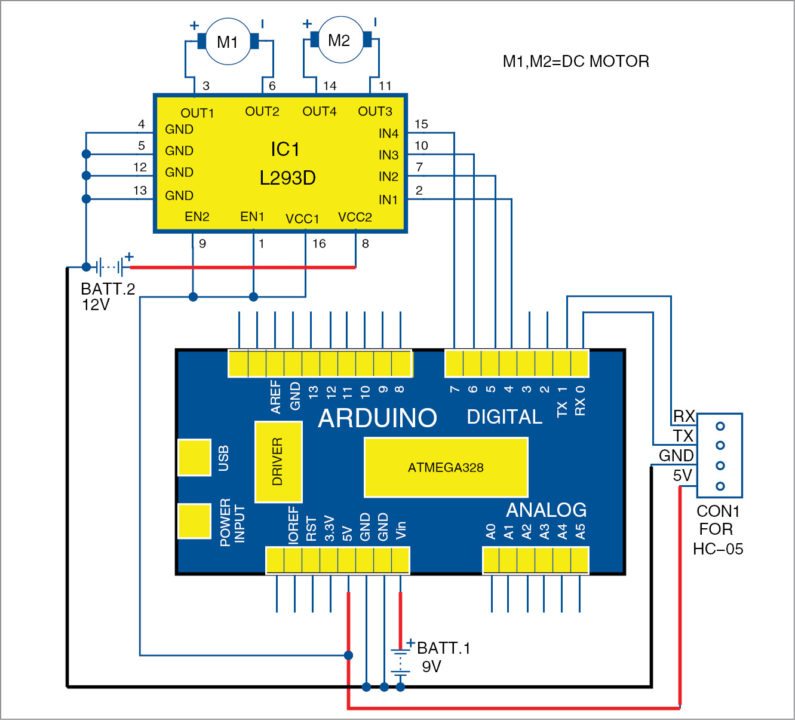
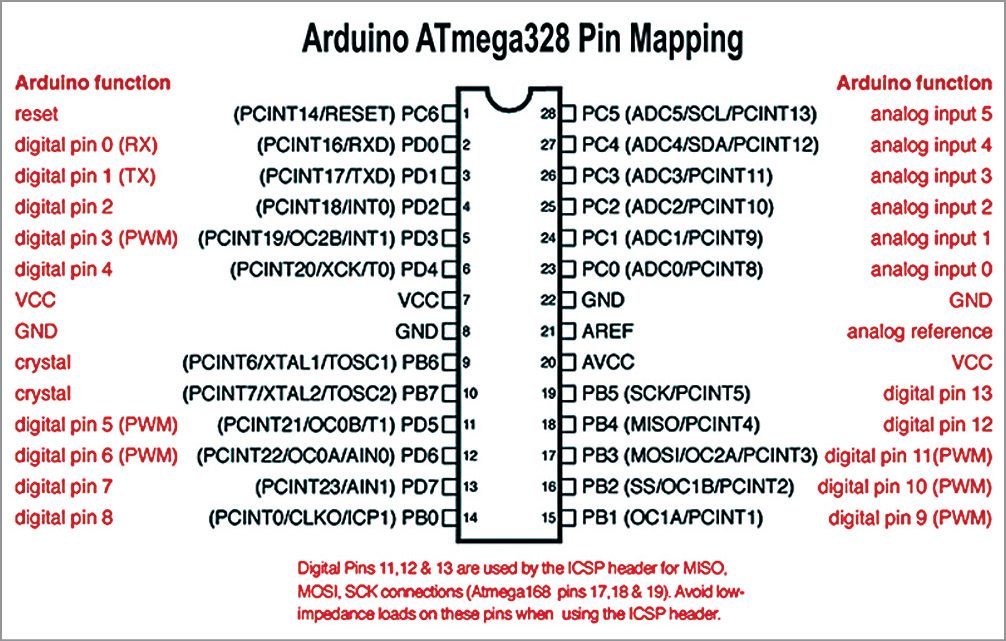
Принципиальная схема автомобиля-робота на базе Arduino, управляемого смартфоном, показана на рис. 2. Расположение контактов Arduino Uno показано на рис. 3.
Рис. 2. Принципиальная схема автомобиля на базе Arduino, управляемого смартфоном
Чип ATmega328 на плате Arduino Uno поставляется с загрузчиком, который позволяет записать программу на чип без внешнего аппаратного программатора. После того, как чип запрограммирован, его можно снять с платы. Плата может питаться от разъема USB или от внешнего источника питания, например, от батарей или адаптеров переменного/постоянного тока. После подключения источника питания к контакту Vin вы получаете регулируемое напряжение 5 В и 3,3 В постоянного тока на соответствующих контактах платы Arduino. Напряжение 5 В используется для питания модуля Bluetooth HC-05.
Рис. 3. Назначение контактов Arduino Uno
Последовательные контакты 0 (RX) и 1 (TX) Arduino используются для связи с модулем HC-05. Контакты с 4 по 7 подключены к микросхеме драйвера двигателя H-моста L293D. Из этих четырех контактов контакты 5 и 6 обеспечивают 8-битный вывод PWM с использованием функции AnalogWrite(), определенной в эскизе Arduino asc_car.ino. Контакты 2 и 3 Arduino (не используются в этом проекте) можно использовать для дополнительных функций, таких как управление освещением, звуковым сигналом и т. д.
Создание и тестирование
Для питания Arduino Uno используется батарея напряжением 9 В, при этом положительная клемма подключена к контакту Vin, а отрицательная клемма подключена к контакту GND. Контакты 5V и GND (земля) Arduino подключены к модулю Bluetooth HC-05. Выводы RX (контакт 0) и TX (контакт 1) Arduino подключены к контактам TX и RX модуля HC-05 соответственно.
Пины с 4 по 7 Arduino подают управляющие сигналы для двигателей. Arduino выводит очень небольшое напряжение с этих контактов. Таким образом, для создания достаточного крутящего момента для двигателей, для которых используется модуль H-Bridge L293D, требуется дополнительный источник питания. Вы можете подать дополнительный источник питания 12 В на контакт 8 (VCC2) L293D для управления двигателями.
Выходные контакты 4–7 Arduino подключены к контактам IN1–IN4 L293D соответственно. Контакты заземления 4, 5, 12 и 13 L293D подключены к контактам заземления Arduino. Два мотор-редуктора постоянного тока со скоростью 100 об/мин (M1 и M2) напрямую подключены к выходным клеммам L293D.
Механическая компоновка бота или автомобиля завершается прикреплением двух колес к двум валам двигателя. Армейские направляющие колеса следует использовать на передней стороне машины для движения влево или вправо. (Во время тестирования в лаборатории EFY в качестве переднего колеса использовалось поворотное колесо.)
Arduino Uno можно запрограммировать с помощью программного обеспечения Arduino (IDE). Выключите модуль Bluetooth или отсоедините его от Arduino while, записав скетч asc_car.ino в Arduino Uno.
Подключите смартфон с модулем HC-05. После завершения всех подключений и механических устройств загрузите приложение Arduino Bluetooth Controller из магазина Google Play на смартфон Android. В Play Store доступно множество подобных приложений. В этом проекте используется ArduinoRC — приложение Arduino Bluetooth Controller, разработанное компанией Estacado’s Ltd.
Откройте приложение ArduinoRC на смартфоне Android и подключитесь к устройству HC-05, введя «1234» или «0000» в качестве PIN-кода для сопряжения с HC-05.
Ценность кормления в приложении
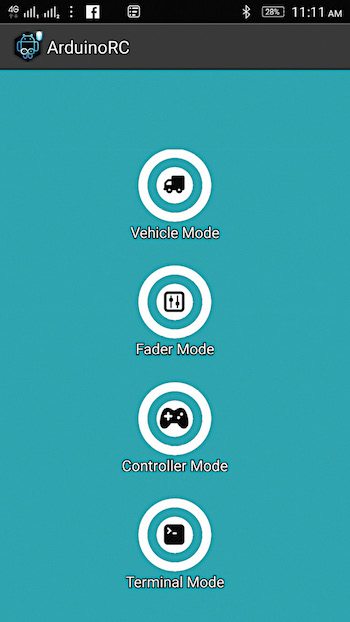
Нажмите «Продолжить», чтобы подключить смартфон к модулю HC-05. Вы увидите экран на своем телефоне Android, как показано на рис. 4. Выберите режим «Автомобиль», откройте меню в правом верхнем углу и выберите опцию «Установить команды». Установите значение «4» для кнопки «Стоп» в приложении. Аналогичным образом введите значения 0, 1, 2 и 3 для Gesture_Front, Gesture_Left, Gesture_Right и Gesture_Back соответственно.
Рис. 4: Режим автомобиля
Подключите аккумулятор 12 В к модулю L293D.
Теперь бот готов управляться с вашего смартфона. Управлять ботом можно, наклоняя смартфон в разные положения. Наклоните телефон вперед или назад, чтобы переместить бота вперед или назад. Аналогичным образом наклоните телефон вправо или влево, чтобы бот повернул направо или налево соответственно.
Слегка изменив схему, вы также сможете использовать это приложение для управления освещением, звуковыми сигналами и музыкальными системами, наклоняя смартфон в разных направлениях.
Все ссылки на книги и журналы, представлены на этом сайте, исключительно для ознакомления, авторские права на эти публикации принадлежат авторам книг и издательствам журналов!
Подробно тут! Жалоба

 Главная
Главная  О сайте
О сайте Об ответственности
Об ответственности Для активных
Для активных Каталог сайтов
Каталог сайтов Html Код кнопки сайта
Html Код кнопки сайта Форум
Форум  Новые сообщения в форуме
Новые сообщения в форуме Поиск по форуму
Поиск по форуму Правила форума
Правила форума RSS
RSS Схемы
Схемы  Найти схему по номеру
Найти схему по номеру Схемы участвующие в конкурсах
Схемы участвующие в конкурсах Инструменты
Инструменты Теория
Теория Схемы для начинающих
Схемы для начинающих Конструкции для дома и дачи
Конструкции для дома и дачи Cхемы бытовых устройств
Cхемы бытовых устройств Усилители НЧ и все к ним
Усилители НЧ и все к ним Шпионские штучки
Шпионские штучки Радиосвязь
Радиосвязь Автомобиль
Автомобиль Компьютер и электроника
Компьютер и электроника Микроконтроллеры
Микроконтроллеры Источники питания
Источники питания Файлы
Файлы Радио-SOFT
Радио-SOFT  Журналы
Журналы Книги по электронике
Книги по электронике  Прошивки, печатки, документация
Прошивки, печатки, документация Вход
Вход  Регистрация
Регистрация
 Выбранная схема!!!
Выбранная схема!!! В настоящее время смартфоны можно использовать для управления множество электрических и электронных устройств, включая двигатели, музыкальные системы и освещение. Здесь мы представляем автомобиль-робот на базе Arduino, которым можно управлять с помощью Android-смартфона с установленным на нем приложением ArduinoRC. Этот бот получает команды с вашего смартфона с помощью модуля Bluetooth. Авторский прототип показан на рис. 1.
В настоящее время смартфоны можно использовать для управления множество электрических и электронных устройств, включая двигатели, музыкальные системы и освещение. Здесь мы представляем автомобиль-робот на базе Arduino, которым можно управлять с помощью Android-смартфона с установленным на нем приложением ArduinoRC. Этот бот получает команды с вашего смартфона с помощью модуля Bluetooth. Авторский прототип показан на рис. 1.